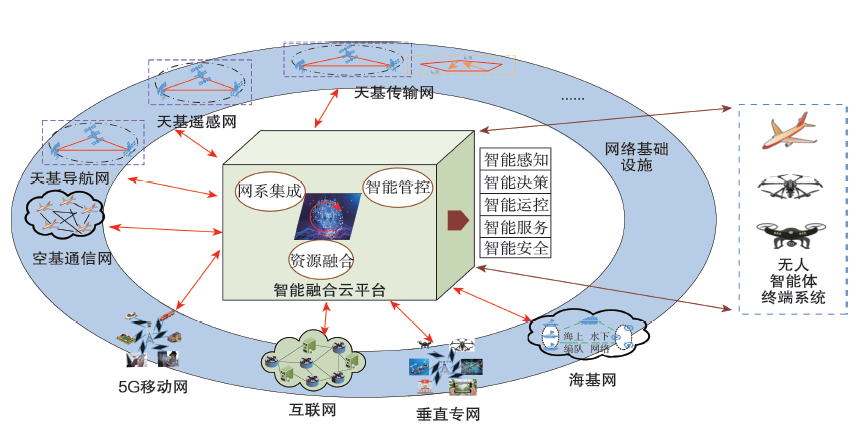
Unmanned aerial vehicle (UAV) is in an important period of rapid technological breakthrough and application growth, which will vigorously promote the low-altitude economy development. The low-altitude Internet of Intelligences (IoI) is the cornerstone of the UAV industry development and an important infrastructure to realize the "human-UVA-physical objects" fusion and AIoT (All in Internet of Thing) in low-altitude airspace. The construction of low-altitude IoI aims to realize the transition from the traditional Internet to the AIoT by the space-air-ground-sea network infrastructure, and to form a physical cyberspace for the digital and intelligent operation of low-altitude services. It can provide a digital, intelligent, and networked environment for the UAV industry, which is of great significance for promoting the development of low-altitude economy.
The conflict between the thriving drone flight demand and the limited low-altitude airspace has become increasingly apparent. Countries of the world are advancing the research on unmanned aerial vehicle (UAV) regulation policies and technical methods. Even in the U.S. Class G airspace that has the least restrictions, the authorities are considering implementing strict UAV regulation. The UAV cloud management system is a new type of digital supervision method, and its framework and technical roadmap have received extensive attention and research from Chinese and international researchers and regulatory authorities. As one of the applications of cloud management system, geographic information technology is specifically advantaged in the following aspects: Using the global navigation satellite system (GNSS) to achieve precise spatial positioning of UAVs; Using remote sensing (RS) technology to obtain information on geographic constraints that affect the flight safety of UAVs; Organize low-altitude geospatial data based on geographic information system (GIS) and construct low-altitude virtual geographic environment, and so on. This article combines the research progress of our team on low-altitude applications of UAVs and points out that geographic information technology can provide solutions for UAV operation management.
The remote sensing data from unmanned aerial vehicle (UAV) networking refer to the remote sensing observation data obtained under the condition of UAV networking. With the increasing complexity of the UAV networking system, the acquired remote sensing data have grown geometrically, which means that it is urgent to construct a standardized UAV networking remote sensing data management architecture matching the UAV networking technology. Unfortunately, there exists no integrated remote sensing data architecture of UAV networking globally. There is also a lack of literature to systematically introduce the architecture of remote sensing data from UAV networking. This study elaborated systematically the development history of remote sensing data from UAV networking, characteristics of the data, data definition and classification standards, acquisition and processing procedures, and different application scenarios. Finally, a preliminary proposal for the architecture construction of remote sensing data from UAV networking is presented. The results of this study may be useful for the exploration of constructing UAV networking remote sensing data architecture, and provide some references for the formulation of relevant industrial standards for UAV networking, as well as the in-depth application of UAV networking remote sensing data.
The random failure of the unmanned aerial vehicles (UAVs) in performing the task of remote sensing will result in the lack of timely response in the mission execution process, affecting the overall result of the mission or causing partial or complete failure of a mission. To address the failure issues, a redundant and fault-tolerant method for UAV remote sensing networking were proposed. With this method, the lead-follower drone group flight mode is used. Multiple networked drones can complete the designated flight tasks stably and reliably. The simulation result verifies the efficacy of the redundant fault-tolerant method, which can help solve the problem of missing data or task failure in the remote sensing of UAV.
With the rapid development of civilian unmanned aircraft system (UAS) in the fields of logistics and distribution, geographic information detection, and emergency rescue, the U.S. Federal Aviation Administration (FAA) and the National Aeronautics and Space Administration (NASA) have jointly developed the Unmanned Aircraft System Traffic Management System (UTM) and carried out a large number of verification tests. According to the technical level, NASA divides the operation technologies and related flight demonstration tests into four technical level phases, of which the TCL-3 and TCL-4 are the core phases of the UTM test and also the most technically complex phases. This article summarized the third and fourth phases of the flight demonstration tests of the UTM system in the United States. Based on the key technologies, the test contents and operation scenarios, as well as the relevant flight experience were summarized. Finally, some recommendations for UTM system design in China were put forward.
Unmanned aerial vehicle (UAV) is increasingly widely used, but with the continuous progress of urban development, the safe operation of UAV in cities is increasingly more prominent. Therefore, environmental risk assessment of obstacles has become one of the key issues in the field of low-altitude UAV research. In this study, taking the Beijing-Tianjin New Town as an example, the low-altitude airspace was divided into micro, light, and small UAV flight zones according to the low-altitude UAV types and operating heights. Based on the shape and size of UAVs, their motion constraints, and obstacle constraints, this research proposed an algorithm for approximation point expansion. The algorithm generates an expanded boundary on the basis of the original boundary of the obstacles, and this expanded boundary serves as a transitional zone between high risk and low risk areas in the low-altitude flight environment. Based on the UAV image data of 0.5 m resolution in the Beijing-Tianjin New Town in 2019, this study extracted obstacle elements in different assessment areas, and generated low-altitude flight obstacle environmental risk maps for different UAV types and different heights based on the risk assessment. The study area was divided into high-risk zone, high-risk transitional zone, medium-risk zone, and low-risk zone according to the threat posed to UAVs. The results show that: 1) The risk transitional zone in the micro, light, and small UAV control areas in the study area accounted for 10.9%, 7.3% and 9.0%, respectively, and the sharp-angle convex vertex optimization of the approximate point expansion algorithm can save about 1% of the airspace resources. 2) The proposed method can calculate the potential collision risk area of the UAVs in the flight area based on the mutual influence of the UAVs and the obstacles, and realize the effective assessment of the environmental risk of the low-altitude obstacles and provide a scientific reference for the navigability of the UAVs of different types in the flight area.
With the rapid growth of the number of unmanned aerial vehicles (UAVs), in order to assess the risk of people on the ground especially in cities, improve the operational efficiency of UAV, and reduce the threat of UAV to the crowd, it is necessary to make a specific path planning for UAVs based on the crowd density. However, static demographic data are still used as the ground risk analysis basis for the path planning of UAV, and real-time path planning of UAV according to the spatial-temporal characteristics of crowd density are often not performed. This study first analyzed the characteristics of urban road network crowd density based on the spatiotemporal data. Second, the convolutional neural network-long short-term memory (CNN-LSTM) combined model (C-Snet model) was established to predict the population density in different urban areas. Finally, the improved A* algorithm was used for real-time path planning and risk assessment of UAV according to the predicted crowd density data. The results show that the risk of UAV operation is reduced by 76%, which can provide a theoretical reference for the development of real-time path planning function of UAV traffic management system.
With the continuous opening of China's low-altitude airspace, relying on the existing low-altitude flight weather support technology to provide services for low-altitude safe flight is to some extent insufficient, and it is also difficult to forecast wind speed that has the greatest impact on flight. Based on the Weather Research and Forecasting (WRF) model mesoscale numerical model, this study simulated the wind speed and direction in the Beijing-Tianjin-Hebei region from 2015 to 2019, then compared the simulation results with the observation data of the weather stations in order to provide simulation tools for the safety of drones flying on low-altitude routes in the region. The main conclusions are as follows: the WRF model can better simulate the seasonal trend of wind speed, the simulation result in the plain areas is better than in the mountainous areas, and the simulated wind speed in the mountainous areas is higher than the observed data but the error is within an acceptable range (RMSE<1.5 m·s-1). The minimum values of average wind speed and maximum wind speed both appear in the late summer, and the maximum average wind speed appears in spring (4.43 m·s-1 in the mountainous areas, 4.13 m·s-1 in the plain areas). The maximum wind speed fluctuates and increases in winter, spring, and early summer, begins to decrease in mid-summer, and decreases to a minimum in late summer and early autumn. Wind speed in the Beijing-Tianjin-Hebei region is decreasing from northwest to southeast, the average wind speed at Potou Station (-0.02 m·s-1·(5 a)-1) and Tianjin Station (-0.02 m·s-1·(5 a)-1) showed a downward trend, the wind speed at other stations showed an upward trend, and Tangshan Station has the largest increase rate (0.08 m·s-1·(5 a)-1). With regard to the seasonal spatial distribution of wind speed, the average wind speed is mainly on the rise, and the station proportions are 45.45% in spring, 90.91% in summer, 63.63% in autumn, and 81.81% in winter. The prevailing wind in the plain areas is northeast-southwest; the wind direction of Huailai Station in the mountainous area is mainly in WNW direction (18.70%) and W direction (15.01%), while the wind direction of Yuxian Station is mainly in N (16.79%) and NNW (12.03%). Compared with the plain areas, the number of strong winds with wind speed of 8.0 m·s-1 has increased significantly in the mountainous areas. At a height of 1000 m, the frequency of strong winds in the plain areas increased significantly and the growth rate was higher than in the mountainous areas, which is not conducive to UAV flight, and the probability of occurrence of wind speeds above 17.0 m·s-1 is also significantly higher than in the mountainous areas.
In this study, the feasibility and effectiveness of unmanned aerial vehicle (UAV) detection system in civil airports were quantitatively evaluated according to the requirements of airport clearance management. First, multidimensional evaluation indicators were analyzed for UAV detection system, including the function, performance, reliability, safety, and deployability. Furthermore, ten system characteristics were considered for the evaluation, including monitoring coverage, effective detection range, spatial positioning accuracy, pitch accuracy, target tracking capability, real-time measurement, confidence degree of alerts, target recognition capability, reliability measure, information security, and deployability. By incorporating these ten characteristics, a comprehensive evaluation model was established based on fuzzy sets and fuzzy measures. The experimental results of multiple types of UAV detection system equipment were showed in real airport scenes. The results indicate that the proposed method can effectively measure the applicability and effectiveness of UAV detection system in civil airports, and has excellent compatibility with different types of technologies. The evaluation results can be well utilized for the selection of UAV detection system in civil airports.
Unmanned aerial vehicle (UAV) is a flexible and efficient platform to accurately obtain high-resolution and multi-source remote sensing data in low altitude airspace. It can provide important information for industrial applications and management decisions. With the arrival of the big-data era, both the hardware and software for acquiring and processing UAV remote sensing data stepped into a fast lane. The enormous amount of data has brought unprecedented opportunities and challenges for UAV remote sensing and industrial applications. In this article, we introduced the history and advances in UAV remote sensing hardware development. The UAVs mounted with lightweight, high-precision, standardized, and integrated sensors would be the future direction of UAV remote sensing hardware development. Then, we summarized the current status of applications in agriculture, forestry and prataculture, surveying, geological hazard monitoring and disaster management, electricity sector, and atmospheric monitoring using UAV remote sensing. The integrated UAV remote sensing platforms equipped with multi-sensors are one of the keys for such applications. Finally, we discussed the intelligent UAV hardware, network operation potential, massive data processing capability, automatic information extraction technique, and future directions in UAV remote sensing. The popularization and standardization of UAV remote sensing application in various industries will largely improve and accelerate national and regional social and economic development.
Sediment transport rate, as an important indicator for studying Earth surface processes and for planning soil and water conservation, is a spatial variable. However, traditional monitoring methods can only obtain the global sediment transport rate in a certain area and are unable to map the spatial distribution of sediment transport rate. In this study, unmanned aerial vehicle (UAV) photogrammetry was used to obtain a two-phase digital elevation model (DEM) and calculate the amount of topographic change. In accordance with the principle of mass conservation and using a multi-flow direction algorithm, a spatial sediment transport model was established, by which the spatial sediment transport rate from a loess watershed was obtained. The results show that this method can effectively simulate the transportation of sediment in space. The area where the mass is not conserved is less than 4%, and the non-conserved areas are mostly those that are affected by human activities. The effects of DEM choice and the level of topographic change detection on the proposed model are also discussed. When DEM in the first phase is used to calculate the sediment transportation path, the area where the mass is not conserved is significantly reduced. The results of the spatial sediment transport model are more robust when a precision map is used to detect topographic changes, whereas the results from topographic changes detected by root mean square error (RMSE) greatly varied under different confidence levels. The proposed model can conveniently and quickly provide a detailed spatial distribution of sediment transport rate through UAV-based topographic change detection, which provides new perspectives for research of Earth surface processes.
The glaciers of the Meili Snow Mountain are now rapidly retreating and thinning, owing to climate change. The main aim of this study was to monitor the dynamics of the Mingyong Glacier in the Meili Snow Mountain based on unmanned aerial vehicle (UAV) survey and UBase. The result of the digital surface model (DSM) in the Mingyong Glacier terminus shows that the surface morphology has a significant difference between the upper and lower sections. The lower section was covered by a large amount of debris, and a few crevasses developed along the direction of glacier flow. Little debris was found in the upper section, and a lot of transverse crevasses developed there. A mean ice thinning of 1.67 m was observed in the terminus of the Mingyong Glacier from November 2018 to November 2019, and surface lowering was heterogeneous. There were positive and negative alternations in surface lowering in the upper section, surface thinning was observed in the middle section, while a significant thickening was observed in the lower section. Compared with glacier changes in other areas in the High Asia Mountains, the Meili Snow Mountain was the region with the most significant glacier surface elevation change.
In recent years, unmanned aerial vehicle (UAV) technology has experienced a great improvement. Due to its flexibility and super-high resolution, UAV has a great development potential in the field of glacier change monitoring. In this study, three UAV surveys were conducted, for the first time above 5400 m altitude, at the Xiao Dongkemadi Glacier, which is located in the Tanggula Mountains on the central Tibetan Plateau. Three UAV products were co-registered based on the reference points of bedrocks around the glacier. Then, we analyzed the ablation pattern of the glacier in a year of balance and ablation season, and further explored the application of UAV in glacier change monitoring and discussed the problems we met, as well as advantages of UAV, to provide some guidance for future research. Our results show that the UAV technology is suitable for the change monitoring in a single and small glacier. It can be used to monitor glacier changes in terminal, area, surface elevation, and detail glacier features.
With the rapid development of civilian unmanned aerial vehicle (UAV) technology, UAV aerial photography has become an important data source for urban image perception research. Based on the photos, text introduction, shooting location, and related data of UAVs photos of Xi'an City obtained from the social media platform SkyPixel, this study used computer vision analysis, computer text emotion analysis, social network analysis, and GIS spatial analysis to explore the city image of Xi'an from the perspective of UAV. The research results show that: 1) UAV aerial photography photos are mainly concentrated in the main urban areas, and there are fewer aerial data points in the suburb. The spatial distribution of photos presents a pattern of dense inside and sparse outside, with the highest density area in the center of the city at the junction zone of the three districts, showing a dumbbell-type distribution extending from the north to south. 2) The visual images are mostly of modern urban landscape description, of which the content of human landscape is dominant. 3) Emotion evaluation presents an overall positive feeling, and the polarization of the popular tourist attractions is obvious in the main urban area. Finally, this study explored the mechanism of city image formation and promotion from the perspective of UAV, and provided recommendations for the optimization of Xi'an city image construction and UAV use policy.