
Linear cultural heritage landscape visual perception location model and demonstration
Received date: 2023-06-05
Revised date: 2023-09-18
Online published: 2024-01-19
Supported by
Social Science Foundation of Hebei Province(HB21SH001)
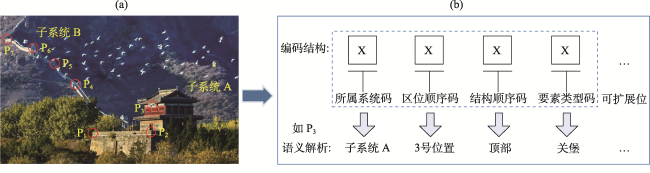
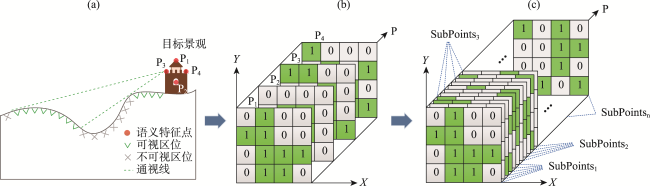
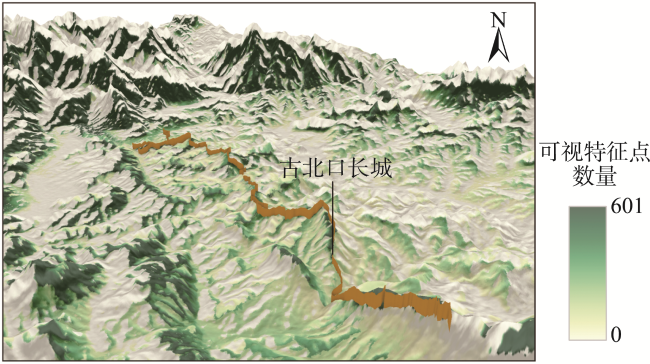
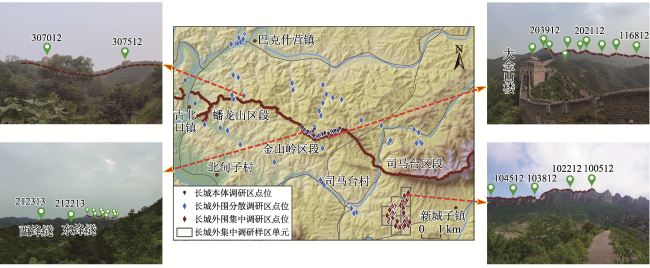
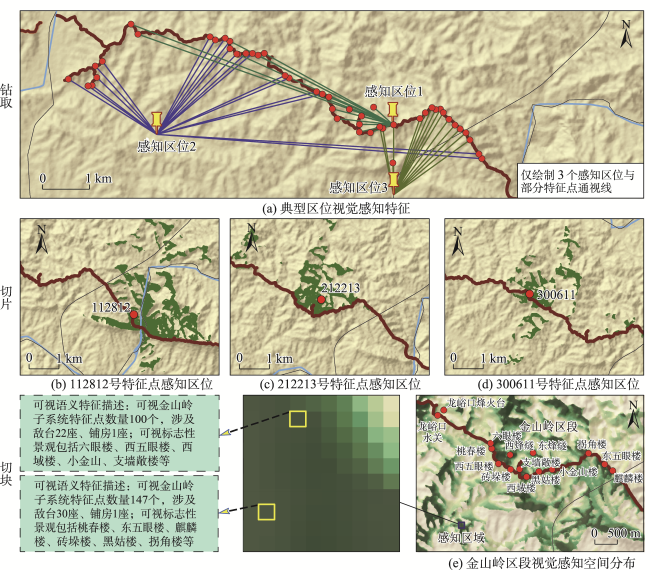
Appropriate visual perception location is a necessary condition for marvellous landscape experience, and rich visual perception spatial information resources will be helpful for exploring the overall perception of beautiful places. Linear cultural heritage not only contains rich resource value and profound cultural heritage assets, but also has important values in the attributes of visual landscape resources. However, the ability of the GIS viewshed computation results to characterize the visual relationship between the visual location and landscape semantics is insufficient for further carrying out the deep value mining of visual landscape resources. Based on the existing methods of landscape visual perception calculation, this study designed the landscape visual perception location model (LVPLM) for linear cultural heritage, and developed the organization method and application logic of the LVPLM dataset based on the NetCDF multidimensional raster data structure. The LVPLM dataset expresses the visual perceptual location through the two-dimensional geographic coordinates and the semantic information of the target landscape through the semantic feature point coding, and then constructs the visual relationship between the visual perceptual location and the landscape semantics, and realizes the information integration of the target landscape, the perceptual location, and the visual state. This study also designed three application modes of the LVPLM dataset, namely "drilling", "slicing", and "dicing", to lay the foundation for multi-modal landscape visual perception information mining and analysis. This study selected the linear cultural heritage landscape resources of the Great Wall for empirical research, established the LVPLM dataset of the Gubeikou Great Wall, and collected visual comparison verification data through field investigation and survey, evaluated the basic credibility of the dataset, initially proved the feasibility and application value of the LVPLM model, and also provided a new data resource for the high-quality construction of the Great Wall National Cultural Park. In addition, the LVPLM model also provides new ideas for the study of the human-environment relationship from the perspective of information expression of interaction perception between humans and the landscape.
SUN Baolei , GUO Fenghua , LI Renjie , CHEN Xinjie . Linear cultural heritage landscape visual perception location model and demonstration[J]. PROGRESS IN GEOGRAPHY, 2024 , 43(1) : 80 -92 . DOI: 10.18306/dlkxjz.2024.01.006
表1 景观语义特征点选取依据与方式Tab.1 Basis and method of landscape semantic feature points selection |
| 特征点选取依据 | 基本规则 | 取点密度 | 取点高程 |
|---|---|---|---|
| 景观系统层级语义特征 | 对景观系统中具有特定语义信息的各层级子系统进行划分并取点 | 取点间隔一般不低于DEM的2倍分辨率;同时,保证最大化维护景观本体语义特征 | 一般取地表高程加上景观本体部件的相对高度 |
| 景观形态与结构特征 | 根据景观本体具体形态进行取点,当涉及景观要素规模大、组成复杂时可进一步根据其具体结构取点 | ||
| 景观类型与功能特征 | 根据景观要素的类型及其具有的特定功能进行取点 |
表2 古北口长城各区段不同类型景观语义特征点编码样例Tab.2 Sample coding of different types of landscape semantic feature points in different sections of the Gubeikou Great Wall |
| 编码样例 | 区段(代码) | 区位顺序 | 要素类型(代码) | 取点方式 | 编码语义解析 |
|---|---|---|---|---|---|
| 100111 | 司马台(1) | 001 | 墙体(1) | 等间隔取点 | 司马台子系统1号区位墙体特征点 |
| 102011 | 司马台(1) | 020 | 墙体(1) | 地形拐点 | 司马台子系统20号区位墙体特征点 |
| 102212 | 司马台(1) | 022 | 敌台(2) | 要素中心点 | 司马台子系统22号区位敌台特征点 |
| 112412 | 司马台(1) | 124 | 敌台(2) | 要素中心点 | 司马台子系统124号区位敌台特征点 |
| 200611 | 金山岭(2) | 006 | 墙体(1) | 地形拐点 | 金山岭子系统6号区位墙体特征点 |
| 211014 | 金山岭(2) | 110 | 铺房(4) | 景观要素中心点 | 金山岭子系统110号区位铺房特征点 |
| 212213 | 金山岭(2) | 122 | 烽火台(3) | 景观要素中心点 | 金山岭子系统122号区位烽火台特征点 |
| 220716 | 金山岭(2) | 207 | 关堡(6) | 景观要素中心点 | 金山岭子系统207号区位关堡特征点 |
| 300912 | 蟠龙山(3) | 009 | 敌台(2) | 景观要素中心点 | 蟠龙山子系统9号区位敌台特征点 |
| 301215 | 蟠龙山(3) | 012 | 水关(5) | 景观要素中心点 | 蟠龙山子系统12号区位水关特征点 |
| 312811 | 蟠龙山(3) | 128 | 墙体(1) | 等间隔取点 | 蟠龙山子系统128号区位墙体特征点 |
| 329013 | 蟠龙山(3) | 290 | 烽火台(3) | 景观要素中心点 | 蟠龙山子系统290号区位烽火台特征点 |
表3 古北口长城LVPLM数据集验证结果Tab.3 Verification results of the LVPLM dataset of the Gubeikou Great Wall |
| 调研区类型 | 观测点数量/个 | Accuracy1/% | Accuracy2/% | |||||
|---|---|---|---|---|---|---|---|---|
| 平均值 | 最大值 | 最小值 | 平均值 | 最大值 | 最小值 | |||
| 长城本体调研区 | 27 | 94.55 | 100 | 70.00 | 76.32 | 95.24 | 52.38 | |
| 长城外围集中调研区 | 60 | 64.28 | 100 | 9.09 | 62.29 | 100 | 9.09 | |
| 长城外围分散调研区 | 50 | 81.07 | 100 | 0 | 77.73 | 100 | 0 | |
| 总体 | 137 | 76.37 | 100 | 0 | 70.69 | 100 | 0 | |
感谢评审专家对论文概念内涵和验证工作提出的宝贵建议;同时感谢河北师范大学旅游文化地理计算研究组各位研究生在野外验证工作中的贡献。
| [1] |
薛芮, 阎景娟. 景观管理嵌入乡村旅游人地关系研究的应用框架建构[J]. 地理科学进展, 2022, 41(3): 510-520.
[
|
| [2] |
|
| [3] |
|
| [4] |
俞孔坚, 奚雪松, 李迪华, 等. 中国国家线性文化遗产网络构建[J]. 人文地理, 2009, 24(3): 11-16, 116.
[
|
| [5] |
单霁翔. 大型线性文化遗产保护初论: 突破与压力[J]. 南方文物, 2006(3): 2-5.
[
|
| [6] |
任唤麟. 基于地理特征的跨区域线性文化遗产旅游形象策略研究[J]. 地理与地理信息科学, 2017, 33(1): 95-101.
[
|
| [7] |
刘滨谊, 张亭. 基于视觉感受的景观空间序列组织[J]. 中国园林, 2010, 26(11): 31-35.
[
|
| [8] |
仇梦嫄, 张捷, 杨加猛. 新健康地理学视角下旅游地多维康复景观构成要素与作用机制研究: 以南京紫金山国家森林公园为例[J]. 地理科学进展, 2023, 42(5): 927-943.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
曹迎春, 张玉坤, 李严. 明长城军事防御聚落体系大同镇烽传系统空间布局研究[J]. 新建筑, 2017(2): 142-145.
[
|
| [15] |
相睿, 沈旸, 周小棣. 基于军事运作的明长城选址与布局特征: 以辽宁小河口段长城为例[J]. 中国文化遗产, 2018(3): 15-23.
[
|
| [16] |
解丹, 张铭昊, 谭立峰. 基于GIS的明长城紫荆关防区防御性聚落空间特征研究[J]. 中国文化遗产, 2020(6): 97-104.
[
|
| [17] |
麦克·柯林斯, 马修·奥基, 亨利·欧文·约翰, 等. “双墙对话”: 英格兰遗产委员会哈德良长城保护管理十年回顾[J]. 中国文化遗产, 2018(3): 62-70.
[
|
| [18] |
李哲, 黄斯, 李严, 等. 山海关选址格局防御体系可视化复现探析[J]. 中国文化遗产, 2022(3): 86-93.
[
|
| [19] |
张立福, 陈浩, 孙雪剑, 等. 多维遥感数据时空谱一体化存储结构设计[J]. 遥感学报, 2017, 21(1): 62-73.
[
|
| [20] |
|
| [21] |
高凡, 乐鹏, 姜良存, 等. GeoCube: 面向大规模分析的多源对地观测时空立方体[J]. 遥感学报, 2022, 26(6): 1051-1066.
[
|
| [22] |
|
| [23] |
张立福, 钟涛, 刘华亮, 等. 中国陆域1∶100万植被指数UNVI多维数据集(2017)[J]. 遥感学报, 2020, 24(11): 1293-1298.
[
|
| [24] |
李仁杰, 谷枫, 郭风华, 等. 基于DEM的交通线文化景观感知与功能分段研究: 紫荆关长城景观的实证[J]. 地理科学, 2015, 35(9): 1086-1094.
[
|
| [25] |
郭风华, 程丽萍, 傅学庆, 等. 基于栅格结构的旅游景观感知计算方法[J]. 地域研究与开发, 2018, 37(1): 125-130.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
王想红, 刘纪平, 徐胜华, 等. 基于NetCDF数据模型的海洋环境数据三维可视化研究[J]. 测绘科学, 2013, 38(2): 59-61.
[
|
| [32] |
|
| [33] |
郭风华, 孙宝磊, 李家慧, 等. 长城视觉景观资源及感知区位计算方法[J]. 地理与地理信息科学, 2022, 38(6): 9-16.
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}