
Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications
Received date: 2021-01-14
Revised date: 2021-06-30
Online published: 2021-11-28
Supported by
National Key Research and Development Program of China(2016YFC0500202)
National Key Research and Development Program of China(2017YFC0503905)
National Natural Science Foundation of China(31971575)
National Natural Science Foundation of China(41771388)
The Inner Mongolia Science and Technology Plan(2019GG009)
Copyright
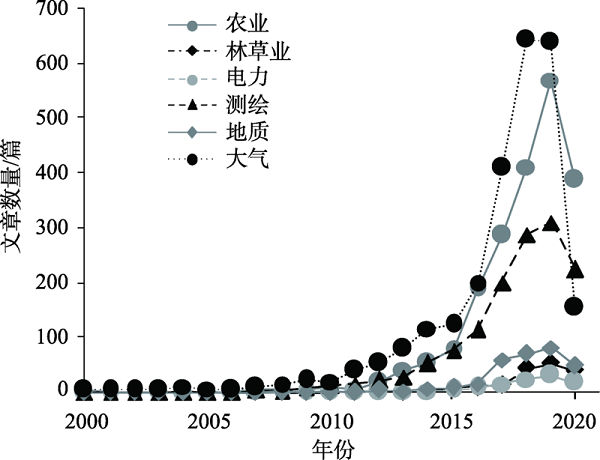
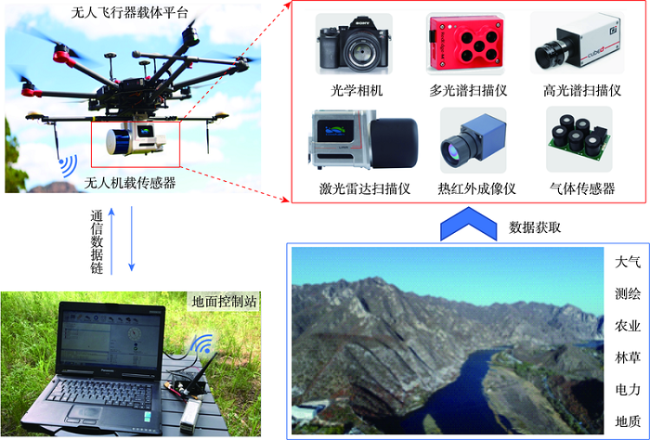
Unmanned aerial vehicle (UAV) is a flexible and efficient platform to accurately obtain high-resolution and multi-source remote sensing data in low altitude airspace. It can provide important information for industrial applications and management decisions. With the arrival of the big-data era, both the hardware and software for acquiring and processing UAV remote sensing data stepped into a fast lane. The enormous amount of data has brought unprecedented opportunities and challenges for UAV remote sensing and industrial applications. In this article, we introduced the history and advances in UAV remote sensing hardware development. The UAVs mounted with lightweight, high-precision, standardized, and integrated sensors would be the future direction of UAV remote sensing hardware development. Then, we summarized the current status of applications in agriculture, forestry and prataculture, surveying, geological hazard monitoring and disaster management, electricity sector, and atmospheric monitoring using UAV remote sensing. The integrated UAV remote sensing platforms equipped with multi-sensors are one of the keys for such applications. Finally, we discussed the intelligent UAV hardware, network operation potential, massive data processing capability, automatic information extraction technique, and future directions in UAV remote sensing. The popularization and standardization of UAV remote sensing application in various industries will largely improve and accelerate national and regional social and economic development.
GUO Qinghua , HU Tianyu , LIU Jin , JIN Shichao , XIAO Qing , YANG Guijun , GAO Xianlian , XU Qiang , XIE Pinhua , PENG Chigang , YAN Li . Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications[J]. PROGRESS IN GEOGRAPHY, 2021 , 40(9) : 1550 -1569 . DOI: 10.18306/dlkxjz.2021.09.010
图3 无人机遥感在农业领域中的主要应用注:植保无人机原图引自大疆官网(https://www.dji.com/cn)。 Fig.3 Applications of UAV remote sensing in agriculture |
| [1] |
|
| [2] |
李德仁, 李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版), 2014, 39(5):505-513, 540.
[
|
| [3] |
廖小罕, 肖青, 张颢. 无人机遥感: 大众化与拓展应用发展趋势[J]. 遥感学报, 2019, 23(6):1046-1052.
[
|
| [4] |
|
| [5] |
单杰, 秦昆, 黄长青, 等. 众源地理数据处理与分析方法探讨[J]. 武汉大学学报(信息科学版), 2014, 39(4):390-396.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
廖小罕, 周成虎. 轻小型无人机遥感发展报告[M]. 北京: 科学出版社, 2016.
[
|
| [18] |
崔志强, 胥值礼, 李军峰, 等. 无人机航空物探技术研发应用现状与展望[J]. 物探化探计算技术, 2016, 38(6):740-745.
[
|
| [19] |
周帅. 无人直升机在民用行业的应用与发展[J]. 舰船电子对抗, 2013, 36(1):117-120.
[
|
| [20] |
刘莉, 杜孟尧, 张晓辉, 等. 太阳能/氢能无人机总体设计与能源管理策略研究[J]. 航空学报, 2016, 37(1):144-162.
[
|
| [21] |
|
| [22] |
孙杰, 林宗坚, 崔红霞. 无人机低空遥感监测系统[J]. 遥感信息, 2003, 18(1):49-50, 27.
[
|
| [23] |
李月, 杨灿坤, 周春平, 等. 无人机载高光谱成像设备研究及应用进展[J]. 测绘通报, 2019(9):1-6, 17.
[
|
| [24] |
|
| [25] |
王岩飞, 刘畅, 詹学丽, 等. 无人机载合成孔径雷达系统技术与应用[J]. 雷达学报, 2016, 5(4):333-349.
[
|
| [26] |
汪沛, 罗锡文, 周志艳, 等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报, 2014, 30(18):1-12.
[
|
| [27] |
丁丽霞, 周斌, 王人潮. 遥感监测中 5 种相对辐射校正方法研究[J]. 浙江大学学报(农业与生命科学版), 2005, 31(3):269-276.
[
|
| [28] |
邢宇. 小波变换在遥感图像相对辐射校正中的应用[J]. 测绘与空间地理信息, 2015, 38(6):13-14, 31.
[
|
| [29] |
|
| [30] |
|
| [31] |
李德仁, 童庆禧, 李荣兴, 等. 高分辨率对地观测的若干前沿科学问题[J]. 中国科学: 地球科学, 2012, 42(6):805-813.
[
|
| [32] |
李焱. 无人机遥感摄影图像处理[D]. 上海: 华东师范大学, 2009.
[
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
贾迪, 朱宁丹, 杨宁华, 等. 图像匹配方法研究综述[J]. 中国图象图形学报, 2019, 24(5):677-699.
[
|
| [37] |
付波. 基于GPU 的 SIFT 和 SURF 算法的研究与实现[D]. 广州: 广东工业大学, 2014.
[
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
杨文攀, 李长春, 杨浩, 等. 基于无人机热红外与数码影像的玉米冠层温度监测[J]. 农业工程学报, 2018, 34(17):68-75, 301.
[
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
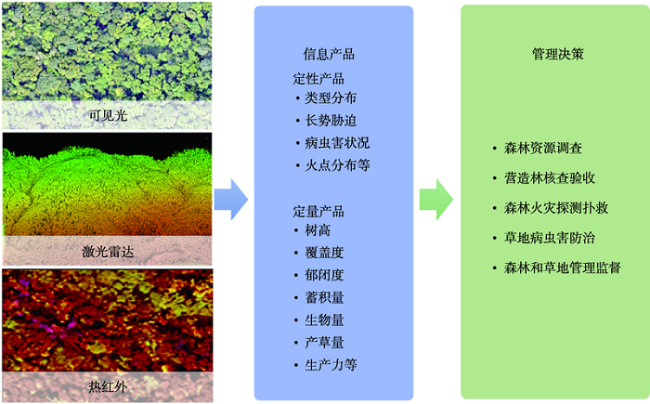
赵国帅. 无人机遥感在林业中的应用与需求分析[J]. 福建林业科技, 2017, 44(1):136-140.
[
|
| [61] |
郭庆华, 刘瑾, 陶胜利, 等. 激光雷达在森林生态系统监测模拟中的应用现状与展望[J]. 科学通报, 2014, 59(6):459-478.
[
|
| [62] |
轩俊伟, 郑江华, 倪亦非, 等. 基于动力三角翼平台的草原鼠害遥感监测研究[J]. 中国植保导刊, 2015, 35(2):52-55.
[
|
| [63] |
李风贤. 无人机技术在草原生态遥感监测中的应用与探讨[J]. 测绘通报, 2017(7):99-102, 107.
[
|
| [64] |
张增, 王兵, 伍小洁, 等. 无人机森林火灾监测中火情检测方法研究[J]. 遥感信息, 2015, 30(1):107-110, 124.
[
|
| [65] |
张严风, 赵璠, 寇卫利, 等. 无人机在林业灾害监测中的应用[J]. 世界林业研究, 2020, 33(2):62-67.
[
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
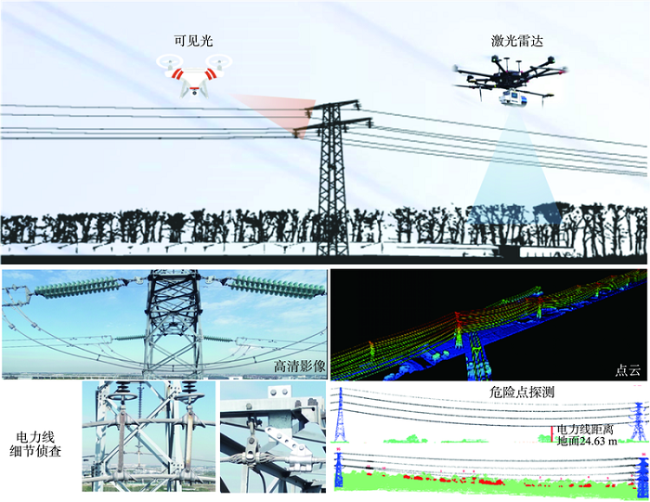
王柯, 付怡然, 彭向阳, 等. 无人机低空遥感技术进展及典型行业应用综述[J]. 测绘通报, 2017(S1):79-83.
[
|
| [72] |
韩宇. 基于旋翼无人机倾斜摄影测量的城市三维实景建模研究[J]. 测绘与空间地理信息, 2019, 42(4):175-178.
[
|
| [73] |
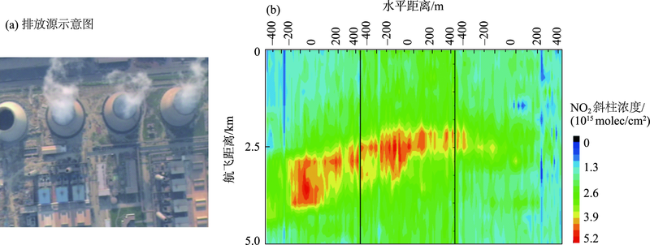
刘文清, 谢品华, 胡肇焜, 等. 大气环境高灵敏光谱探测技术[J]. 环境监控与预警, 2019, 11(5):1-7.
[
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
程多祥. 无人机移动测量数据快速获取与处理[M]. 北京: 测绘出版社, 2015.
[
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
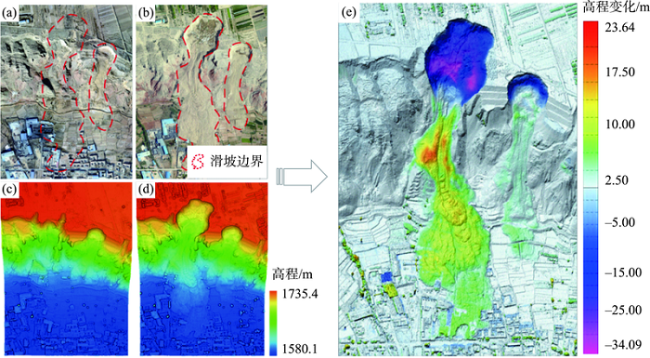
许强, 董秀军, 李为乐. 基于天—空—地一体化的重大地质灾害隐患早期识别与监测预警[J]. 武汉大学学报(信息科学版), 2019, 44(7):957-966.
[
|
| [91] |
|
| [92] |
龚健雅, 季顺平. 摄影测量与深度学习[J]. 测绘学报, 2018, 47(6):693-704.
[
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}