
Development of unmanned aerial vehicle cloud management system with the application of geographic information technology
Received date: 2020-10-07
Revised date: 2021-03-24
Online published: 2021-11-28
Supported by
National Key Research and Development Program of China(2017YFB0503005)
National Natural Science Foundation of China(41971359)
National Natural Science Foundation of China(41771388)
Tianjin Intelligent Manufacturing Project(Tianjin-IMP-2018-2)
Copyright
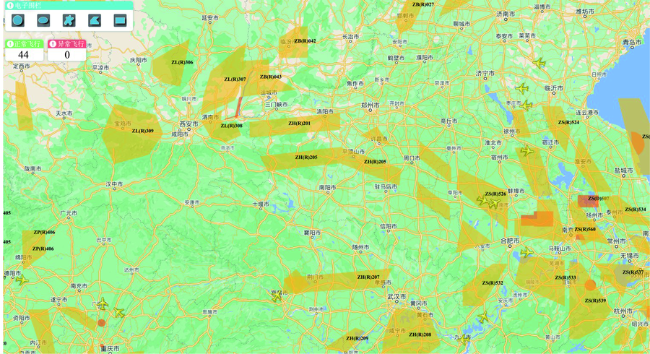
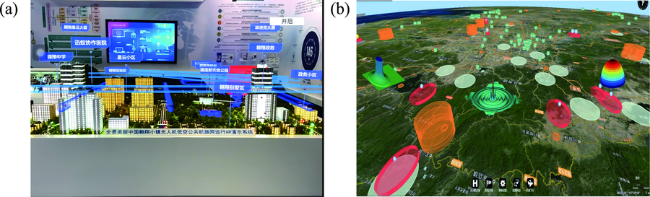
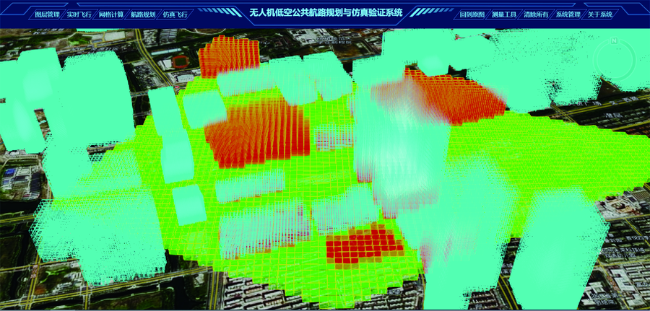
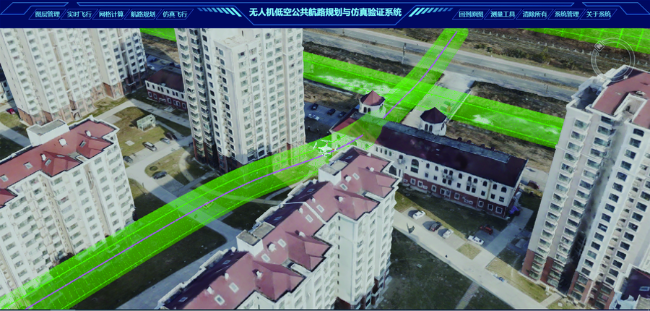
The conflict between the thriving drone flight demand and the limited low-altitude airspace has become increasingly apparent. Countries of the world are advancing the research on unmanned aerial vehicle (UAV) regulation policies and technical methods. Even in the U.S. Class G airspace that has the least restrictions, the authorities are considering implementing strict UAV regulation. The UAV cloud management system is a new type of digital supervision method, and its framework and technical roadmap have received extensive attention and research from Chinese and international researchers and regulatory authorities. As one of the applications of cloud management system, geographic information technology is specifically advantaged in the following aspects: Using the global navigation satellite system (GNSS) to achieve precise spatial positioning of UAVs; Using remote sensing (RS) technology to obtain information on geographic constraints that affect the flight safety of UAVs; Organize low-altitude geospatial data based on geographic information system (GIS) and construct low-altitude virtual geographic environment, and so on. This article combines the research progress of our team on low-altitude applications of UAVs and points out that geographic information technology can provide solutions for UAV operation management.
Key words: UAV; cloud management system; geographic information; GNSS; RS
TAN Junming , LIAO Xiaohan . Development of unmanned aerial vehicle cloud management system with the application of geographic information technology[J]. PROGRESS IN GEOGRAPHY, 2021 , 40(9) : 1451 -1466 . DOI: 10.18306/dlkxjz.2021.09.002
感谢中国民航管理干部学院伊群教授在本文撰写过程中提供的宝贵意见。
| [1] |
中国民航局. 2020年全国民航工作会议召开 [EB/OL]. 2020-01-06 [2020-10-01]. http://www.caac.gov.cn/XWZX/MHYW/202001/t20200106_200171.html.
[Civil Aviation Administration of China. 2020 national civil aviation work conference held. 2020-01-06 [2020-10-01]. http://www.caac.gov.cn/XWZX/MHYW/202001/t20200106_200171.html.]
|
| [2] |
柏艺琴. 2019年无人机云数据统计报告[EB/OL]. 2020-07-13 [2020-10-01]. https://mp.weixin.qq.com/s/1euKvsiY4FAjD1AXf5hbQw.
[
|
| [3] |
Federal Aviation Administration. Aircraft registration: Unmanned aircraft (UA)[EB/OL]. 2019-02-25 [2020-10-01]. https://www.faa.gov/licenses_certificates/aircraft_certification/aircraft_registry/UA/.
|
| [4] |
Ministry of Land, Infrastructure, Transport and Tourism. Flight rules for UAVs (Drones, radio-controlled air vehicles, etc.)[EB/OL]. 2015-10-17 [2020-10-01]. http://www.mlit.go.jp/koku/koku_tk10_000003.html.
|
| [5] |
中国民航局. 关于征求《无人驾驶航空器飞行管理暂行条例(征求意见稿)》意见的通知 [EB/OL]. 2018-01-26 [2020-11-17]. http://www.caac.gov.cn/HDJL/YJZJ/201801/t20180126_48853.html.
[Civil Aviation Administration of China. Notice on soliciting opinions on the "interim regulations on flight management of unmanned aircraft (Draft for comment)". 2018-01-26 [2020-11-17]. http://www.caac.gov.cn/HDJL/YJZJ/201801/t20180126_48853.html. ]
|
| [6] |
中国民用航空局. 轻小无人机运行规定(试行) [EB/OL]. 2015-12-29 [2020-11-17]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201601/t20160113_26519.html.
[Civil Aviation Administration of China. Regulations on the operation of light and small UAVs (Trial). 2015-12-29 [2020-11-17]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201601/t20160113_26519.html.]
|
| [7] |
中华人民共和国公安部. 公安部关于《中华人民共和国治安管理处罚法(修订公开征求意见稿)》公开征求意见的公告 [EB/OL]. 2017-01-16 [2020-10-01]. http://www.mps.gov.cn/n2254536/n4904355/c5604357/content.html.
[The Ministry of Public Security of the People's Republic of China. Announcement of the ministry of public security on public consultation on the public security administration punishment law of the People's Republic of China (Revised draft for public comment). 2017-01-16 [2020-10-01]. http://www.mps.gov.cn/n2254536/n4904355/c5604357/content.html. ]
|
| [8] |
中华人民共和国工业和信息化部. 关于《无人机制造企业规范条件》的公示 [EB/OL]. 2018-11-23 [2020-10-01]. http://www.miit.gov.cn/n1146285/n1146352/n3054355/n3057585/n3057593/c6508654/content.html.
[Ministry of Industry and Information Technology of the People's Republic of China. Announcement on the "Regulations for UAV manufacturing enterprises". 2018-11-23 [2020-10-01]. http://www.miit.gov.cn/n1146285/n1146352/n3054355/n3057585/n3057593/c6508654/content.html.]
|
| [9] |
刘菲, 吕人力. 民用无人机运行管理立法分析与建议[J]. 科技导报, 2020, 38(16):15-28.
[
|
| [10] |
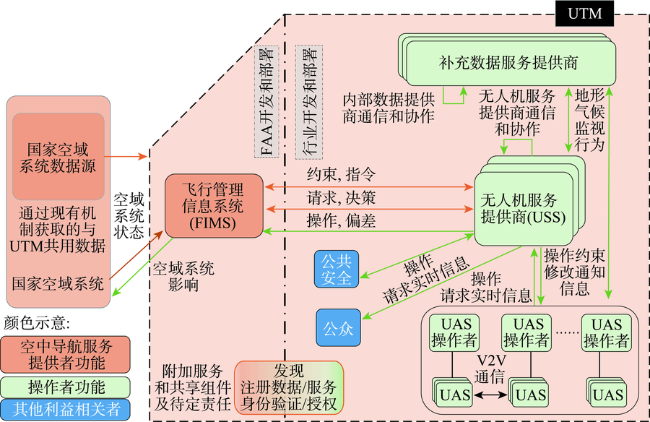
National Aeronautics and Space Administration. NASA UTM 2015: The next era of aviation[EB/OL]. 2015-07-28 [2020-10-01]. https://utm.arc.nasa.gov/utm2015.shtml.
|
| [11] |
Federal Aviation Administration. UAS traffic mangement(UTM): Research transition team plan[EB/OL]. 2017-01-30 [2020-10-01]. https://www.faa.gov/uas/research_development/traffic_management/media/FAA_NASA_UAS_Traffic_Management_Research_Plan.pdf.
|
| [12] |
Federal Aviation Administration. UAS data exchange (LAANC)[EB/OL]. 2019-11-01 [2020-10-01]. https://www.faa.gov/uas/programs_partnerships/data_exchange/.
|
| [13] |
Federal Aviation Administration. UTM pilot program[EB/OL]. 2019-05-09 [2020-10-01]. https://www.faa.gov/uas/research_development/traffic_management/utm_pilot_program/.
|
| [14] |
Federal Aviation Administration. Unmanned aircraft systems (UAS) traffic management (UTM) concept of operations[EB/OL]. 2018-05-18 [2020-10-01]. https://utm.arc.nasa.gov/docs/2018-UTM-ConOps-v1.0.pdf.
|
| [15] |
National Aeronautics and Space Administration. What is NASA doing to test the technologies?[EB/OL]. 2019-11-01 [2020-10-01]. https://utm.arc.nasa.gov/index.shtml.
|
| [16] |
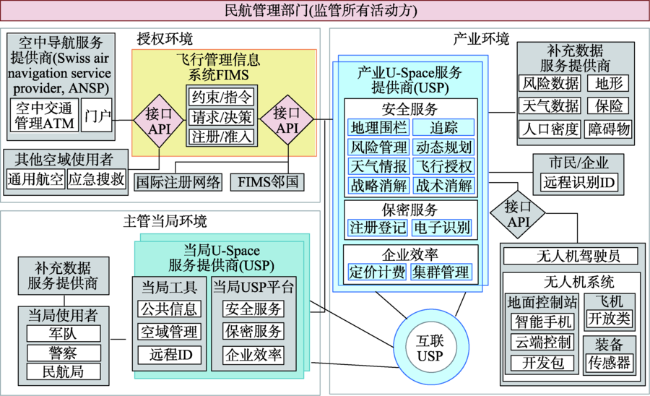
SESAR. Supporting safe and secure drone operations in Europe[EB/OL]. 2020-03-09 [2020-10-01]. https://www.sesarju.eu/sites/default/files/documents/u-space/U-space%20Drone%20Operations%20Europe.pdf.
|
| [17] |
The Single European Sky ATM Research Joint Undertaking. U-space blueprint[EB/OL]. 2017-06-09 [2020-10-01]. https://www.sesarju.eu/u-space-blueprint.
|
| [18] |
The Single European Sky ATM Research Joint Undertaking. Initial view on principles for the U-space architecture[EB/OL]. 2019-07-29 [2020-10-01]. https://www.sesarju.eu/node/3402.
|
| [19] |
The Swiss Federal Office of Civil Aviation. Swiss U-Space concept of operations (ConOps)[EB/OL]. 2019-09-27 [2020-10-01]. https://www.bazl.admin.ch/bazl/en/home/good-to-know/drones-and-aircraft-models/u-space.html.
|
| [20] |
Civil Aviation Authority of Singapore. MOT and CAAS Issue Call-For-Proposal to Develop Solutions for Innovative UAS Operations in Singapore[EB/OL]. 2017-11-03[2020-10-01]. https://www.caas.gov.sg/about-caas/newsroom/Detail/mot-and-caas-issue-call-for-proposal-to-develop-solutions-for-innovative-uas-operations-in-singapore.
|
| [21] |
|
| [22] |
sUAS News. Singapore deploys first successful trial UTM system: Creating the foundation for urban air mobility[EB/OL]. 2021-03-16 [2021-03-18]. https://www.suasnews.com/2021/03/singapore-deploys-first-successful-trial-utm-system-creating-the-foundation-for-urban-air-mobility/.
|
| [23] |
廖小罕, 许浩. 无人机运行监管技术发展与应用 [M]. 北京: 科学出版社, 2020.
[
|
| [24] |
柏艺琴, 陈新锋, 原军锋. 基于大数据的无人机云交换平台统计分析技术研究[J]. 地球信息科学学报, 2019, 21(4):560-569.
[
|
| [25] |
柏艺琴. 中国无人机运行数据统计报告 [M]. 北京: 中国民航出版社, 2019.
[
|
| [26] |
|
| [27] |
张建平, 陈晓, 任家龙. 民用无人机交通管理策略综述[J]. 航空计算技术, 2017, 47(6):122-128.
[
|
| [28] |
张文宇, 孙蕊. 用于精细化无人机管控的GNSS/INS组合导航定位及完好性监测算法[C]// 第11届中国卫星导航年会论文集. 成都, 2020: 82-89.
[
|
| [29] |
赵小勇, 杨恒辉. 一种新的地形跟随飞行方法与关键技术研究[J]. 计算机测量与控制, 2012, 20(7):1983-1985, 1995.
[
|
| [30] |
徐喜梅, 黄大庆, 徐诚. 利用地面景象信息辅助的无人机自主定位技术[J]. 计算机测量与控制, 2018, 26(9):158-162.
[
|
| [31] |
中国民用航空局. 无人机围栏(MH/T 2008-2017) [EB/OL]. 2017-10-20 [2020-10-01]. http://pilot.caac.gov.cn/jsp/airmanNews/airmanNewsDetail.jsp?uuid=a070ac6b-5096-4de9-976f-000282f97036&code=UAV#down.
[Civil Aviation Administration of China. UAV fence (MH/T 2008-2017). 2017-10-20 [2020-10-01]. http://pilot.caac.gov.cn/jsp/airmanNews/airmanNewsDetail.jsp?uuid=a070ac6b-5096-4de9-976f-000282f97036&code=UAV#down.]
|
| [32] |
|
| [33] |
付其喜, 梁晓龙, 张佳强, 等. 自主飞行无人机地理围栏算法设计与实现[J]. 西安交通大学学报, 2019, 53(5):167-175.
[
|
| [34] |
|
| [35] |
|
| [36] |
李腾, 汤新民. 基于柔性四维航迹预测的无人机动态围栏规划[J]. 航空计算技术, 2019, 49(5):79-84.
[
|
| [37] |
雷小奇, 王卫星, 赖均. 一种基于形状特征进行高分辨率遥感影像道路提取方法[J]. 测绘学报, 2009, 38(5):457-465.
[
|
| [38] |
吴炜, 骆剑承, 沈占锋, 等. 光谱和形状特征相结合的高分辨率遥感图像的建筑物提取方法[J]. 武汉大学学报(信息科学版), 2012, 37(7):800-805.
[
|
| [39] |
张天怡, 代沁伶, 徐伟恒, 等. 高分辨率遥感影像城市绿地提取方法研究[J]. 西南林业大学学报(自然科学), 2020, 40(4):105-114.
[
|
| [40] |
洪亮, 黄雅君, 杨昆, 等. 复杂环境下高分二号遥感影像的城市地表水体提取[J]. 遥感学报, 2019, 23(5):871-882.
[
|
| [41] |
徐文学, 杨必胜, 魏征, 等. 多标记点过程的LiDAR点云数据建筑物和树冠提取[J]. 测绘学报, 2013, 42(1):51-58.
[
|
| [42] |
李永强, 李鹏鹏, 董亚涵, 等. 车载LiDAR点云数据中杆状地物自动提取与分类[J]. 测绘学报, 2020, 49(6):724-735.
[
|
| [43] |
季虹良, 戴晨光, 张鑫禄, 等. 深度图像分割的城市区域倾斜影像密集匹配点云滤波算法[J]. 测绘科学技术学报, 2017, 34(5):491-495.
[
|
| [44] |
张航, 陈彬, 薛含章, 等. 基于无人机和LIDAR的三维场景建模研究[J]. 系统仿真学报, 2017, 29(9):1914-1920.
[
|
| [45] |
林珲, 龚建华, 施晶晶. 从地图到地理信息系统与虚拟地理环境: 试论地理学语言的演变[J]. 地理与地理信息科学, 2003, 19(4):18-23.
[
|
| [46] |
睿初. Airlook与中科院地理资源所联合发布AirlookMap, 推动城市三维高精度地图大规模商用[EB/OL]. 2020-08-13 [2020-10-01]. https://36kr.com/p/834779514514816.
[
|
| [47] |
邓世军, 王永杰, 窦华成, 等. 数据分页技术的海量三维数据模型动态调度[J]. 测绘科学, 2013, 38(4):97-100.
[
|
| [48] |
张立立, 周芹, 冯振华. S3M空间三维模型数据格式的特点和应用[J]. 北京测绘, 2020, 34(1):23-26.
[
|
| [49] |
袁武彬, 廖明伟, 廖明, 等. 鄱阳湖区域风场矢量的Web三维动态可视化[J]. 地理与地理信息科学, 2020, 36(1):22-26.
[
|
| [50] |
奚大平, 江文萍. 地理要素三维模型的建立及其与地形融合的研究[J]. 测绘通报, 2011(4):23-25.
[
|
| [51] |
鲍诗度, 陈文懿. 基于虚拟现实技术的公共环境设计系统设计[J]. 现代电子技术, 2020, 43(16):165-169.
[
|
| [52] |
李健, 王顺利, 潘华, 等. 基于移动终端的增强现实地下管线可视化技术[J]. 郑州大学学报(理学版), 2019, 51(3):115-119.
[
|
| [53] |
金安, 程承旗. 基于全球剖分网格的空间数据编码方法[J]. 测绘科学技术学报, 2013, 30(3):284-287.
[
|
| [54] |
|
| [55] |
苗双喜, 程承旗, 任伏虎, 等. 地球剖分型GIS数据模型[J]. 地理信息世界, 2020, 27(4):22-29.
[
|
| [56] |
|
| [57] |
李锋, 万刚, 曹雪峰, 等. 面向低空防撞的虚拟地理环境数据组织及应用[J]. 信息工程大学学报, 2015, 16(4):494-497.
[
|
| [58] |
冯登超. 基于激光点云数据的无人驾驶航空器系统空中走廊构建[J]. 计算机测量与控制, 2018, 26(2):133-141.
[
|
| [59] |
冯登超. 面向低空安全的三维空中走廊可视化研究综述[J]. 电子测量技术, 2018, 41(9):2-9.
[
|
| [60] |
廖小罕, 徐晨晨, 岳焕印. 基于地理信息的无人机低空公共航路规划研究[J]. 无人机, 2018(2):45-49.
[
|
| [61] |
徐晨晨, 廖小罕, 岳焕印, 等. 基于改进蚁群算法的无人机低空公共航路构建方法[J]. 地球信息科学学报, 2019, 21(4):570-579.
[
|
| [62] |
徐晨晨, 叶虎平, 岳焕印, 等. 城镇化区域无人机低空航路网迭代构建的理论体系与技术路径[J]. 地理学报, 2020, 75(5):917-930.
[
|
| [63] |
中国经济网. 中科院地理资源所成功开展无人机管控系统全国入网测试演练 [EB/OL]. 2017-03-27 [2020-10-01]. http://www.ce.cn/cysc/newmain/yc/jsxw/201703/27/t20170327_21435145.shtml.
[China Economic Net. The institute of geographical resources of the Chinese academy of sciences successfully carried out a national network access test exercise for drone control systems. 2017-03-27 [2020-10-01]. http://www.ce.cn/cysc/newmain/yc/jsxw/201703/27/t20170327_21435145.shtml.]
|
| [64] |
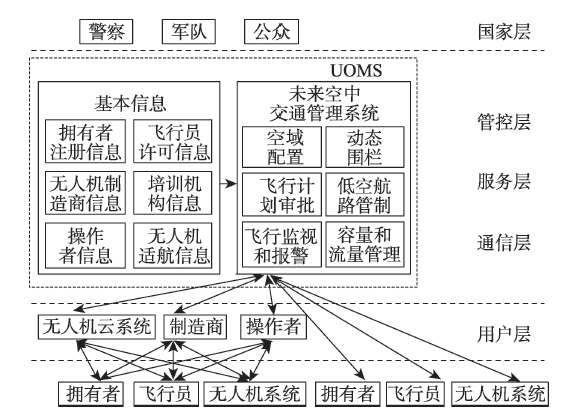
中国科学院地理科学与资源研究所. “中科天网”无人机综合管理云系统正式获得中国民用航空局批准运行 [EB/OL]. 2019-04-17 [2020-10-01]. http://www.igsnrr.cas.cn/xwzx/zhxw/201904/t20190417_5276493.html.
[Institute of Geographical Sciences and Natural Resources Research, Chinese Academy of Sciences. "Zhongke Tianwang" UAV integrated management cloud system was officially approved by the civil aviation administration of China. 2019-04-17 [2020-10-01]. http://www.igsnrr.cas.cn/xwzx/zhxw/201904/t20190417_5276493.html.]
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}