
基于人群密度风险的无人机动态路径规划研究
|
焦庆宇(1995— ),男,河南新乡人,硕士生,主要从事空中交通运输规划与管理研究。E-mial: jiaoqingyu1125@sina.com |
收稿日期: 2020-12-29
修回日期: 2021-03-30
网络出版日期: 2021-11-28
基金资助
国家重点研发计划项目(2017YFB0503005)
中国科学院重点部署项目(ZDRW-KT-2020-2-1)
天津科技计划项目智能制造专项(Tianjin-IMP-2018-2)
版权
Dynamic path planning of unmanned aerial vehicle based on crowd density prediction
Received date: 2020-12-29
Revised date: 2021-03-30
Online published: 2021-11-28
Supported by
National Key Research and Development Program of China(2017YFB0503005)
The Key Research Program of Chinese Academy of Sciences(ZDRW-KT-2020-2-1)
Tianjin Intelligent Manufacturing Project(Tianjin-IMP-2018-2)
Copyright
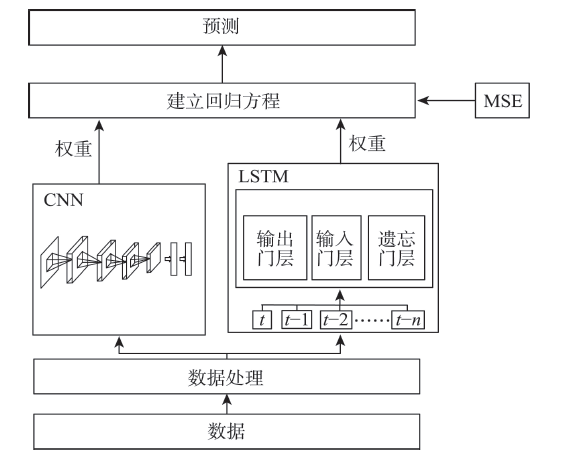
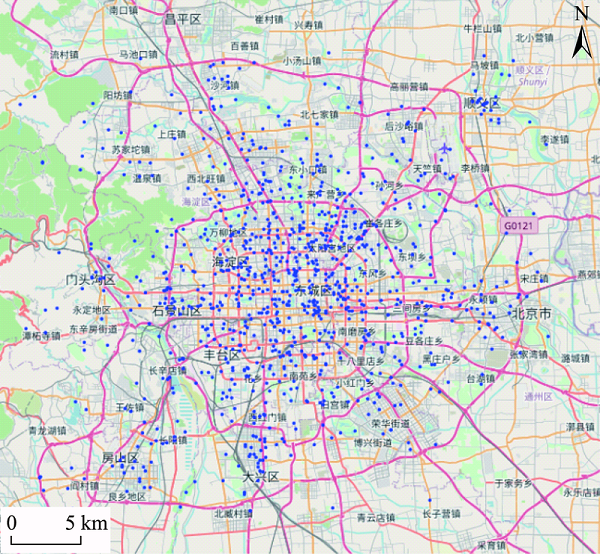
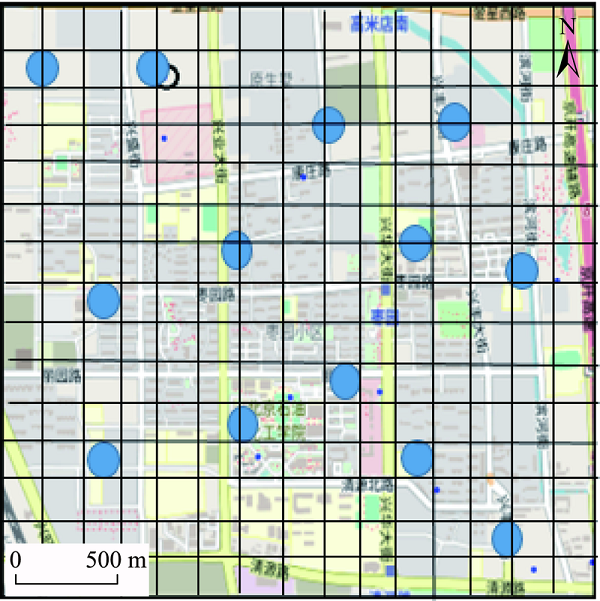
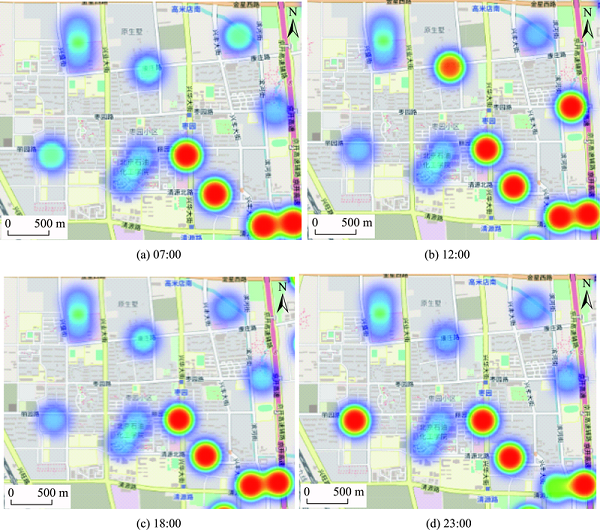
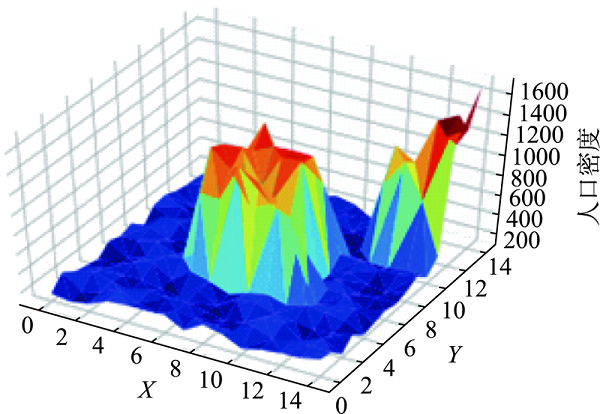
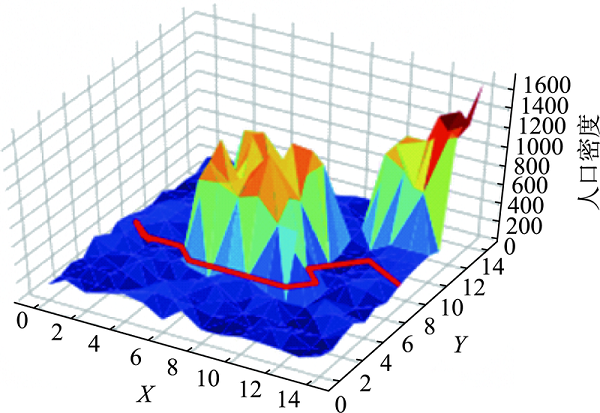
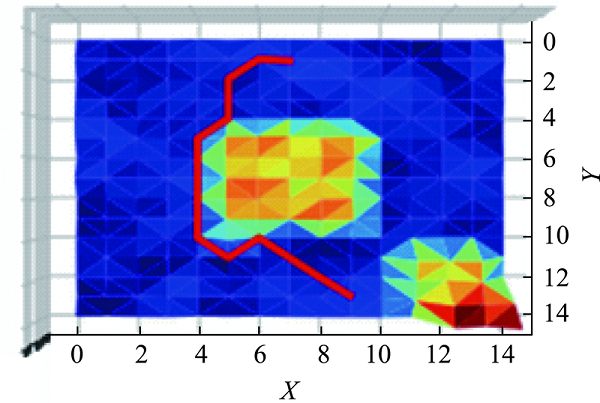
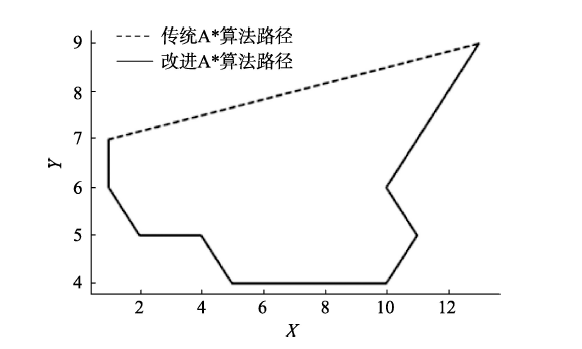
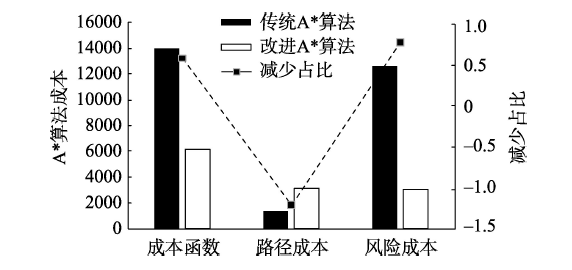
为解决无人机数量的快速增长导致其对地面尤其是城市内运行风险的提升,提高无人机的运行效率,减少无人机对地面人群造成的威胁,需基于人群密度对无人机制定特定的路径规划。然而,现阶段对无人机进行路径规划时仍以静态人口统计数据作为地面风险的分析依据,未能根据人群密度的时空变化特征对无人机进行实时路径规划。论文首先分析城市路网人群密度时空数据特征;其次,利用卷积神经网络对不同区域的人群密度进行预测;最后,根据已预测的人群密度数据,利用改进A*算法对无人机进行实时路径规划及风险评估。使用该模型对北京上空无人机路径进行规划,结果显示,无人机运行风险降低了76%,可为无人机交通管理系统实时路径规划功能的建立提供理论参考。
焦庆宇 , 陈新锋 , 郑志刚 , 柏艺琴 , 刘艳思 , 张正娟 , 孙龙妮 . 基于人群密度风险的无人机动态路径规划研究[J]. 地理科学进展, 2021 , 40(9) : 1516 -1527 . DOI: 10.18306/dlkxjz.2021.09.007
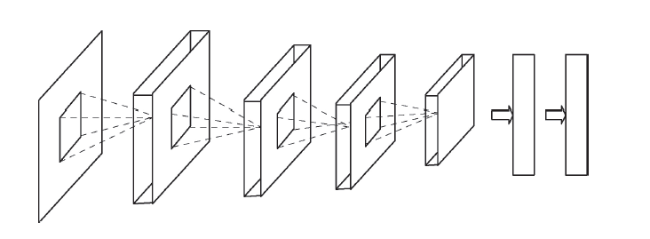
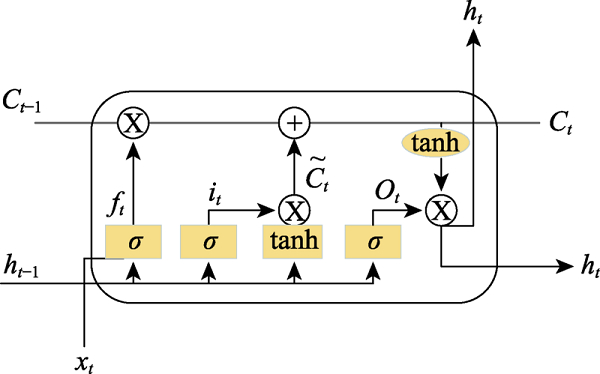
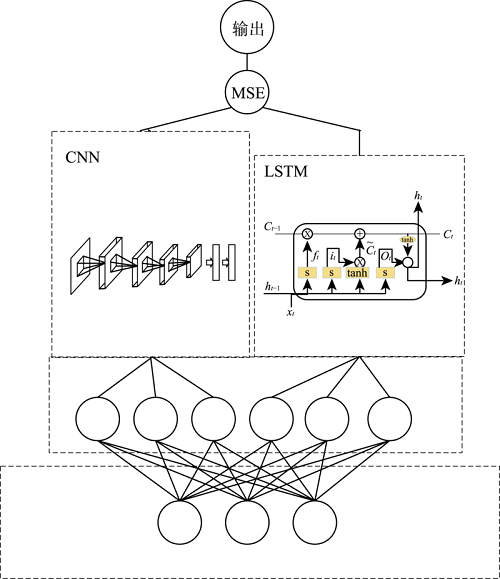
With the rapid growth of the number of unmanned aerial vehicles (UAVs), in order to assess the risk of people on the ground especially in cities, improve the operational efficiency of UAV, and reduce the threat of UAV to the crowd, it is necessary to make a specific path planning for UAVs based on the crowd density. However, static demographic data are still used as the ground risk analysis basis for the path planning of UAV, and real-time path planning of UAV according to the spatial-temporal characteristics of crowd density are often not performed. This study first analyzed the characteristics of urban road network crowd density based on the spatiotemporal data. Second, the convolutional neural network-long short-term memory (CNN-LSTM) combined model (C-Snet model) was established to predict the population density in different urban areas. Finally, the improved A* algorithm was used for real-time path planning and risk assessment of UAV according to the predicted crowd density data. The results show that the risk of UAV operation is reduced by 76%, which can provide a theoretical reference for the development of real-time path planning function of UAV traffic management system.
Key words: UAV traffic management; risk assessment; CNN; crowd density; path planning
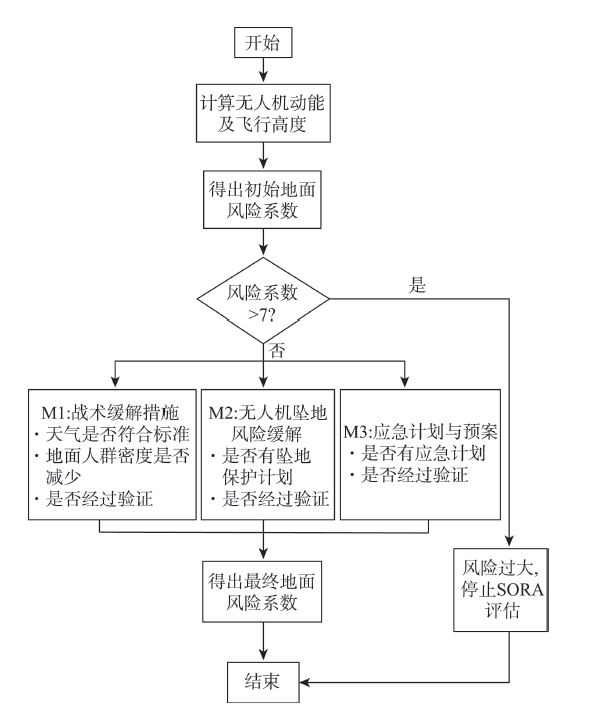
表1 SORA评估初始地面风险系数Tab.1 SORA initial ground risk scores |
| 指标 | 无人机尺寸/m | |||
|---|---|---|---|---|
| 1 | 3 | 8 | >8 | |
| 动能 | <700 J | <34 kJ | <1084 kJ | >1084 kJ |
| 运行场景 | ||||
| 视距内运行(VLOS),受控区域且人口稀少 | 1 | 2 | 3 | 4 |
| 视距外运行(BVLOS),受控区域且人口稀少 | 2 | 3 | 4 | 5 |
| VLOS,人口居住区 | 3 | 4 | 5 | 6 |
| BVLOS,受控区域且在人口居住区 | 4 | 5 | 6 | 8 |
| BVLOS,人口居住区 | 5 | 6 | 8 | 10 |
| VLOS,密集人群 | 7 | |||
| BVLOS,密集人群 | 8 | |||
表3 人口密度指数Tab.3 Population density index |
| 编号 | 观测 时间 | 中心点 经度/(°E) | 中心点 纬度/(°N) | 范围 面积/m2 | 区域人群密度指数 |
|---|---|---|---|---|---|
| 1 | 2020-01-17T01:00 | 116.201 | 39.906 | 90062 | 2.9 |
| 2 | 2020-01-17T03:00 | 116.311 | 39.933 | 100235 | 1.0 |
| 3 | 2020-01-17T09:00 | 116.251 | 39.920 | 73640 | 6.5 |
表4 模型参数调整Tab.4 Model parameter adjustments |
| epoch | 学习速率(lr) | |||
|---|---|---|---|---|
| MSE (标准化) | ||||
| 0.1 | 0.01 | 0.001 | ||
| 100 | 0.98 | 0.22 | 0.22 | |
| 500 | 1.00 | 0.19 | 0.15 | |
| 1000 | 0.63 | 0.14 | 0.08 | |
表5 基于不同卷积核数量的卷积层性能Tab.5 Performance of convolution layers based on different numbers of convolution cores |
| Conv1 | Conv2 | Maxpooling | MSE |
|---|---|---|---|
| 3×3 | 3×3 | 3×3 | 14.7 |
| 5×5 | 3×3 | 3×3 | 10.5 |
| 7×7 | 3×3 | 3×3 | 12.3 |
表6 基于不同神经元数量的全连接层性能Tab.6 Performance of the full join layer based on different numbers of neurons |
| 神经元数量 | MSE | 拟合速率/s |
|---|---|---|
| 64-64-64 | 15.48(欠拟合) | 1048.06 |
| 256-256-256 | 7.03 | 1326.51 |
| 256-128-64 | 7.07 | 1023.37 |
表7 模型对比Tab.7 Model comparison |
| 模型 | R2 | MSE | MAE |
|---|---|---|---|
| SVM | 0.73 | 4.02 | 18.30 |
| RF | 0.82 | 3.77 | 10.25 |
| Multi regression | 0.70 | 14.23 | 22.30 |
| C-Snet | 0.86 | 3.78 | 5.32 |
| [1] |
中国民航局. 中国民用航空局低空联网无人机安全飞行测试报告 [EB/OL]. 2018-02-06 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201811/t20181127_193186.html.
[Civil Aviation Administration of China. CAAC low altitude networking UAV flight safety test report. 2018-02-06 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201811/t20181127_193186.html.]
|
| [2] |
徐瑞华, 罗帆. 机场净空区无人机扰航监管演化博弈研究[J]. 中国安全科学学报, 2019, 29(5):25-30.
[
|
| [3] |
[
|
| [4] |
中国民用航空局航空器适航审定司. 基于运行风险的无人机适航审定指导意见 [EB/OL]. 2019-01-25 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/ZFGW/201901/P020190125609946283900.pdf.
[CAAC Aircraft Airworthiness Certification Department. Guidance on airworthiness certification of UAV based on operational risk. 2019-01-25 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/ZFGW/201901/P020190125609946283900.pdf.]
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
张启钱, 许卫卫, 张洪海, 等. 复杂低空物流无人机路径规划[J]. 北京航空航天大学学报, 2020, 46(7):1275-1286.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
Joint Authorities for Rulemaking of Unmanned Systems. JARUS guidelines on Specific Operations Risk Assessment (SORA)[EB/OL]. 2019-01-30 [2020-11-01]. https://rpas-regulations.com/wp-content/uploads/2017/07/170626_JARUS_Specific-Operations-Risk-Assessment_SORA_v1.0.pdf.
|
| [14] |
胡莘婷, 戴福青. 基于城区行人安全的无人机运行风险评估[J]. 中国安全科学学报, 2020, 30(8):137-142.
[
|
| [15] |
中国民用航空局航空器适航审定司. 无人机云系统数据规范: MH-T2011-2019 [EB/OL]. 2019-10-22 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/BZGF/HYBZ/202008/P020200824383769494708.pdf.
[CAAC Aircraft Airworthiness Certification Department. UAV cloud system data specification: MH-T2011-2019. 2019-10-22 [2020-11-01]. http://www.caac.gov.cn/XXGK/XXGK/BZGF/HYBZ/202008/P020200824383769494708.pdf. ]
|
| [16] |
中国民用航空局航空器适航审定司. 无人机云系统接口数据规范: MH-T2009-2017 [EB/OL]. 2017-10-20[2020-11-01]. http://www.caac.gov.cn/HDJL/YJZJ/201707/P020170711601854912740.pdf.
[CAAC Aircraft Airworthiness Certification Department. Specification for interface data of unmanned aircraft system: MH-T2009-2017. 2017-10-20[2020-11-01]. http://www.caac.gov.cn/HDJL/YJZJ/201707/P020170711601854912740.pdf.]
|
| [17] |
廖小罕. 地理科学发展与新技术应用[J]. 地理科学进展, 2020, 39(5):709-715.
[
|
| [18] |
付婧婷, 陈慈发. 风力下的无人机偏离公共航路仿真研究[J]. 信息通信, 2020, 33(11):49-53.
[
|
| [19] |
魏宗康, 高荣荣, 周姣, 等. 基于椭圆概率误差的落点精度评定方法[J]. 导弹与航天运载技术, 2020(2):58-63.
[
|
| [20] |
|
| [21] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}