
无人机低空飞行障碍物环境风险评估方法研究——以京津新城为例
|
贺洪波(1998— ),男,山西大同人,博士生,主要从事无人机低空运行风险评估、无人机遥感研究。E-mail: hehb. 20b@igsnrr.ac.cn |
收稿日期: 2020-11-30
修回日期: 2021-02-26
网络出版日期: 2021-11-28
基金资助
中国科学院重点部署项目(ZDRW-KT-2020-2-1)
国家自然科学基金项目(41771388)
国家自然科学基金项目(41971359)
天津科技计划项目智能制造专项(Tianjin-IMP-2018-2)
版权
Environmental risk assessment of obstacles in low-altitude flight of unmanned aerial vehicle: Taking the Beijing-Tianjin New Town as an example
Received date: 2020-11-30
Revised date: 2021-02-26
Online published: 2021-11-28
Supported by
The Key Research Program of Chinese Academy of Sciences(ZDRW-KT-2020-2-1)
National Natural Science Foundation of China(41771388)
National Natural Science Foundation of China(41971359)
Tianjin Intelligent Manufacturing Project(Tianjin-IMP-2018-2)
Copyright
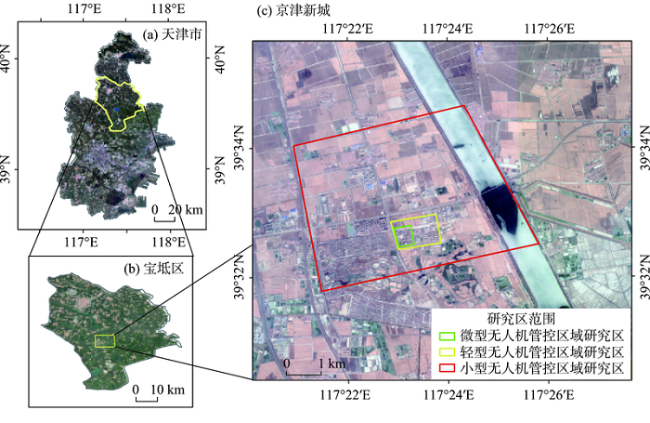
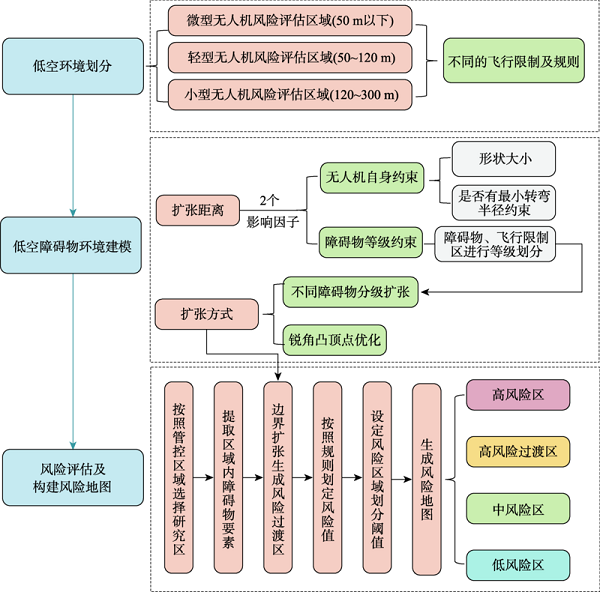
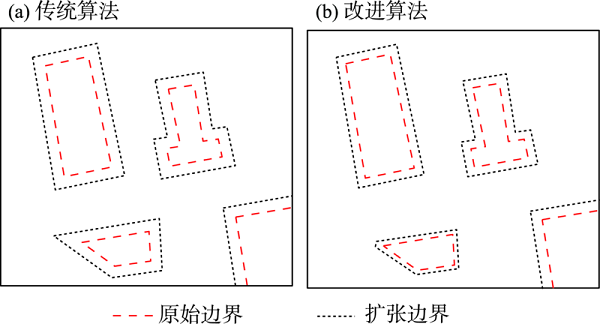
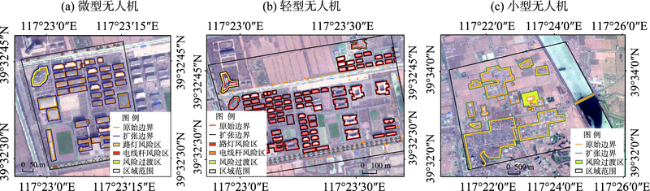
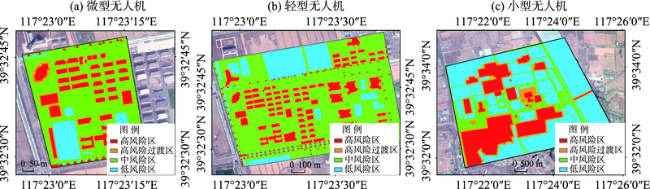
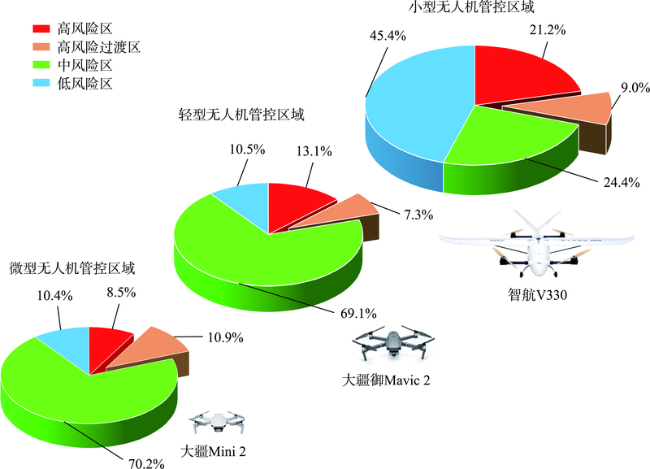
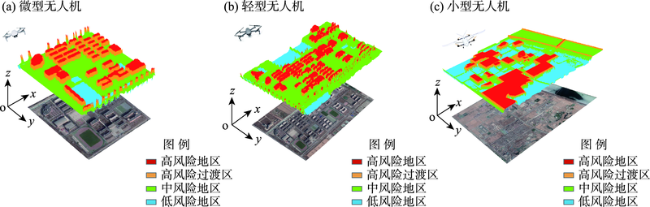
无人机应用日益广泛,但随着城市环境建设的不断推进,无人机在城市中安全运行的问题也日益突出,因此无人机低空障碍物环境风险评估成为无人机领域研究的关键问题之一。论文按照不同类型无人机及运行高度将低空空域划分为微型、轻型和小型无人机风险评估区域,在充分考虑无人机自身形状大小、运动约束以及障碍物约束等条件的基础上,提出一种近似点扩张算法,基于障碍物原始边界生成扩张边界,并将其作为低空飞行环境中高风险与低风险之间的风险过渡区。以京津新城为例,分别提取不同风险评估区内的障碍物要素,并基于风险评估技术生成面向微型、轻型和小型无人机多高度层的低空飞行障碍物环境风险地图,按其对无人机威胁程度分为高风险区、高风险过渡区、中风险区和低风险区。实验结果表明:研究区内微型、轻型、小型无人机风险评估区内的风险过渡区分别占10.9%、7.3%、9.0%,该方法可以在考虑无人机与障碍物相互影响的基础上,计算飞行区域内无人机潜在碰撞风险区域,实现对低空障碍物环境风险的科学有效评估,为不同机型的无人机在飞行区域内的可航行性提供科学参考。
贺洪波 , 徐晨晨 , 叶虎平 . 无人机低空飞行障碍物环境风险评估方法研究——以京津新城为例[J]. 地理科学进展, 2021 , 40(9) : 1503 -1515 . DOI: 10.18306/dlkxjz.2021.09.006
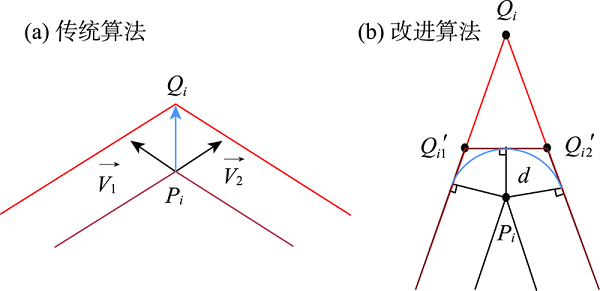
Unmanned aerial vehicle (UAV) is increasingly widely used, but with the continuous progress of urban development, the safe operation of UAV in cities is increasingly more prominent. Therefore, environmental risk assessment of obstacles has become one of the key issues in the field of low-altitude UAV research. In this study, taking the Beijing-Tianjin New Town as an example, the low-altitude airspace was divided into micro, light, and small UAV flight zones according to the low-altitude UAV types and operating heights. Based on the shape and size of UAVs, their motion constraints, and obstacle constraints, this research proposed an algorithm for approximation point expansion. The algorithm generates an expanded boundary on the basis of the original boundary of the obstacles, and this expanded boundary serves as a transitional zone between high risk and low risk areas in the low-altitude flight environment. Based on the UAV image data of 0.5 m resolution in the Beijing-Tianjin New Town in 2019, this study extracted obstacle elements in different assessment areas, and generated low-altitude flight obstacle environmental risk maps for different UAV types and different heights based on the risk assessment. The study area was divided into high-risk zone, high-risk transitional zone, medium-risk zone, and low-risk zone according to the threat posed to UAVs. The results show that: 1) The risk transitional zone in the micro, light, and small UAV control areas in the study area accounted for 10.9%, 7.3% and 9.0%, respectively, and the sharp-angle convex vertex optimization of the approximate point expansion algorithm can save about 1% of the airspace resources. 2) The proposed method can calculate the potential collision risk area of the UAVs in the flight area based on the mutual influence of the UAVs and the obstacles, and realize the effective assessment of the environmental risk of the low-altitude obstacles and provide a scientific reference for the navigability of the UAVs of different types in the flight area.
表1 无人机与各类型障碍物的距离限制Tab.1 Distance limitation between UAV and various obstacles |
| 障碍物等级 | 障碍物类型 | 不同类型的无人机应保持的最小距离 | ||
|---|---|---|---|---|
| 微型 | 轻型 | 小型 | ||
| Ⅰ | 民用航路 | 10 km | ||
| 国界线、边境线 | 我方一侧5 km | |||
| Ⅱ | 军事机场净空区、民用机场障碍物限制面 | 2 km | ||
| 有人驾驶航空器临时起降点 | 2 km | |||
| Ⅲ | 军事禁区及管理区、党政机关、核电站 | 10 m | 20 m | 1000 m |
| 易燃易爆危险品相关企业和仓库、电力设施、加油站、车站码头 | 10 m | 20 m | 1000 m | |
| 高塔、电网、风力发电 | 5 m | 10 m | 1000 m | |
| Ⅳ | 建筑物、高铁、公路 | 5 m | 10 m | 500 m |
| 电线杆、交通设施 | 5 m | 5 m | 200 m | |
| Ⅴ | 农田、树林、江河湖泊、操场、山川、无人机飞行验证场 | 获得空域申请后,保证安全前提下,可以飞行 | ||
注:表格中障碍物要素及飞行限制区参考自《无人驾驶航空器飞行管理暂行条例(征求意见稿)》[15]。 |
表2 基于机型和高度的无人机低空运行环境风险因子Tab.2 Environmental risk factors for UAV low-altitude operation based on aircraft type and altitude |
| 无人机类型 | 政策规定安全距离 | 自身性能安全距离 | 运行高度H/m | 适用场景 |
|---|---|---|---|---|
| 微型 | <50 | 城市航拍/农林植保 | ||
| 轻型 | 50~120 | 城市低空快递/安防监控/公共安全 | ||
| 小型 | 120~300 | 应急救援/空中测绘 |
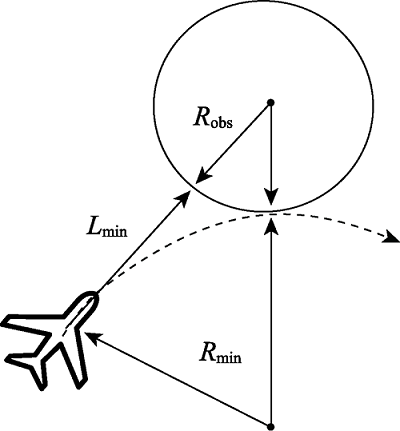
注: 表示转弯指令时延造成的误差, 表示无人机外形约束, 表示最小转弯半径约束。 |
表3 各类型障碍物及地理要素风险值划定Tab.3 Risk value of various types of obstacles and geographical elements |
| 障碍物要素 等级 | 障碍物要素 | 风险值划定 | |
|---|---|---|---|
| 原边界内风险值 | 风险过渡区风险值 | ||
| Ⅰ | 民用航路、国界线 | 999 | 900 |
| Ⅱ | 机场净空区、机场障碍物限制面 | 888 | 800 |
| Ⅲ | 军事禁区、核电站、党政机关、易燃易爆物品仓库、加油站、电力设施、车站码头 | 666 | 600 |
| Ⅳ | 建筑物、路灯、电线杆、 高铁、公路 | 99 70 | 89 69 |
| Ⅴ | 树林、山川、操场 农田、水体、无人机飞行验证场 | 50 30 | |
注:对于Ⅰ~Ⅲ级障碍物,风险值设置极高。如果属于规定的禁飞区,则需要在研究区中去掉该区域,作为无人机禁止飞入区域,再对剩下的区域进行风险评估。 |
表4 风险区域的划分及相关描述Tab.4 Division of risk area and description |
| 风险区域 | 风险指数阈值 | 风险区描述 |
|---|---|---|
| 高风险区 | >0.86 | 多为飞行限制区以及影响无人机正常飞行的障碍物 |
| 高风险过渡区 | 0.70~0.86 | 根据无人机机型、障碍物约束得到的风险缓冲区 |
| 中风险区 | 0.28~0.70 | 无人机在该区域内飞行有潜在航行风险 |
| 低风险区 | <0.28 | 无人机在该区域内飞行风险较低 |
表5 微型和轻小型无人机机型相关参数及扩张距离设定Tab.5 Parameters and expansion distance settings for micro and light and small-sized UAVs |
| 相关参数 | 微型无人机 | 轻型无人机 | 小型无人机 |
|---|---|---|---|
| 型号 | 大疆Mini 2 | 大疆御Mavic 2 | 智航V330 |
| 类型 | 多旋翼无人机 | 多旋翼无人机 | 垂直起降固定翼无人机 |
| 长、宽、高/mm | 159×203×56 | 322×242×84 | 1650×3300×680 |
| 机身重量/g | 249 g | 905g | 15000g |
| 最大飞行高度/m | 500 | 500 | 3500 |
| 最大水平飞行速度/(km/h) | 40 | 72 | 91 |
| 续航/min | 25~30 min | 25~30 | 90 |
| 最小转弯半径 | 无 | 无 | 30 m |
| 障碍物扩张距离参数影响因子 | 外形+障碍物等级约束 | 外形+障碍物等级约束 | 外形+最小转弯半径 +障碍物等级约束 |
注:最大飞行高度是在无干扰、无遮挡、无限高条件下物理可爬行最高高度,实际飞行需按照规则要求飞行;最大水平飞行速度是在理想无风条件下的速度,实际速度受实际飞行气象条件影响。 |
| [1] |
廖小罕, 周成虎, 苏奋振, 等. 无人机遥感众创时代[J]. 地球信息科学学报, 2016, 18(11):1439-1447.
[
|
| [2] |
民用无人机检验中心. 2019年无人机云数据统计报告 [EB/OL]. 2020-07-13 [2020-11-02]. http://news.carnoc.com/list/538/538437.html.
[Civil UAV Test Center. UAV cloud data statistical report in 2019. 2020-07-13 [2020-11-02]. http://news.carnoc.com/list/538/538437.html.]
|
| [3] |
深圳统计局. 深圳市2018年国民经济和社会发展统计公报 [EB/OL]. 2019-04-19 [2020-11-02]. http://tjj.sz.gov.cn/zwgk/zfxxgkml/tjsj/tjgb/content/post_3084909.html.
[Shenzhen Statistical Bureau. Shenzhen statistical bulletin of national economic and social development in 2018. 2019-04-19 [2020-11-02]. http://tjj.sz.gov.cn/zwgk/zfxxgkml/tjsj/tjgb/content/post_3084909.html.]
|
| [4] |
廖小罕. 地理科学发展与新技术应用[J]. 地理科学进展, 2020, 39(5):709-715.
[
|
| [5] |
廖小罕, 肖青, 张颢. 无人机遥感: 大众化与拓展应用发展趋势[J]. 遥感学报, 2019, 23(6):1046-1052.
[
|
| [6] |
廖小罕, 徐晨晨, 岳焕印. 基于地理信息的无人机低空公共航路规划研究[J]. 无人机, 2018(2):45-49.
[
|
| [7] |
徐晨晨, 叶虎平, 岳焕印, 等. 城镇化区域无人机低空航路网迭代构建的理论体系与技术路径[J]. 地理学报, 2020, 75(5):917-930.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
杨乐. 面向海岛航拍的无人机航迹规划算法研究[D]. 青岛: 中国海洋大学, 2014.
[
|
| [12] |
中国民航局. 无人驾驶航空器飞行管理暂行条例(征求意见稿) [EB/OL]. 2018-01-26 [2020-11-02]. http://www.caac.gov.cn/HDJL/YJZJ/201801/t20180126_48853.html.
[Civil Aviation Administration of China. Interim regulations on flight management of unmanned aircraft (Draft for solicitation of comments). 2018-01-26 [2020-11-02]. http://www.caac.gov.cn/HDJL/YJZJ/201801/t20180126_48853.html.]
|
| [13] |
陈麒杰, 晋玉强, 韩露. 无人机路径规划算法研究综述[J]. 飞航导弹, 2020(5):54-58.
[
|
| [14] |
|
| [15] |
张会, 李铖, 程炯, 等. 基于"H-E-V"框架的城市洪涝风险评估研究进展[J]. 地理科学进展, 2019, 38(2):175-190.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
杨宙翔. 无人机航空摄影测量技术在地形测量中的应用[J]. 资源信息与工程, 2018, 33(5):127-128.
[
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
葛声, 刘聪锋, 蔡啸. 无人机航路规划评估[J]. 舰船电子对抗, 2018, 41(1):20-25, 50.
[
|
| [30] |
彭珍妮, 裴锦华. 我国民用无人机管理现状与思考[J]. 科技资讯, 2017, 15(31): 136, 138.
[
|
| [31] |
刘向君. 基于蚁群算法的无人机未知环境路径规划[D]. 太原: 中北大学, 2020.
[
|
| [32] |
邓晓斌. 基于ArcGIS两种空间插值方法的比较[J]. 地理空间信息, 2008, 6(6):85-87.
[
|
| [33] |
王翰章. 小型无人机室外非结构化环境中的自主路径规划[D]. 大连: 大连海事大学, 2020.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}