
NASA无人机交通管理系统飞行验证试验概述
|
王茂霖(1992— ),男,四川广元人,讲师,主要研究方向为无人机设计、无人机运行管理等。E-mail: wangmaolin@camic.cn |
收稿日期: 2021-02-05
修回日期: 2021-05-18
网络出版日期: 2021-11-28
基金资助
国家重点研发计划项目(2017YFB0503401)
国家自然科学基金项目(71731001)
国家自然科学基金项目(U1933130)
国家自然科学基金项目(U1433203)
国家自然科学基金项目(U1533119)
民航协同空管技术及应用重点实验室开放基金课题(0151010)
版权
An overview of flight demonstration of NASA unmanned aircraft system traffic management system
Received date: 2021-02-05
Revised date: 2021-05-18
Online published: 2021-11-28
Supported by
National Key Research and Development Program of China(2017YFB0503401)
National Natural Science Foundation of China(71731001)
National Natural Science Foundation of China(U1933130)
National Natural Science Foundation of China(U1433203)
National Natural Science Foundation of China(U1533119)
Civil Aviation Cooperative Air Traffic Management Technology and Application Key Laboratory Open Fund Projects(0151010)
Copyright
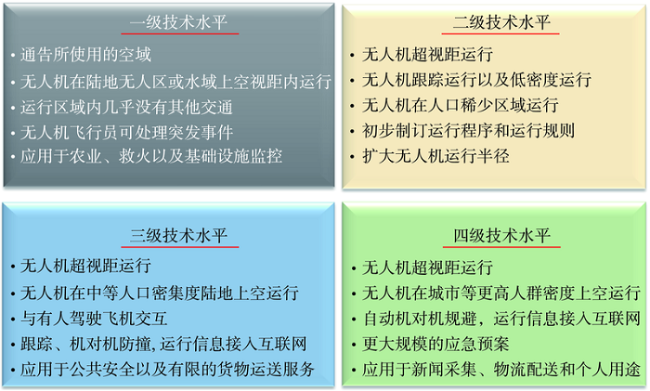
随着民用无人机在物流配送、地理信息探测和应急救援等领域的快速发展,美国联邦航空局(FAA)和美国航空航天局(NASA)合作开发了无人机交通管理系统(UTM),并开展了大量的验证试验。根据技术难度,NASA将运行技术和相关的飞行验证试验分为4个技术能力水平阶段,其中第三和第四阶段是UTM试验的核心阶段,也是技术难度最高的2个阶段。论文整理了美国无人机交通管理系统第三和第四技术能力水平阶段的飞行验证试验,根据各项关键技术,对试验内容及运行场景等进行了概述,总结了相关试验经验,对中国无人机运行管理系统的试验设计提出了建议。
王茂霖 , 吕人力 , 管祥民 . NASA无人机交通管理系统飞行验证试验概述[J]. 地理科学进展, 2021 , 40(9) : 1488 -1502 . DOI: 10.18306/dlkxjz.2021.09.005
With the rapid development of civilian unmanned aircraft system (UAS) in the fields of logistics and distribution, geographic information detection, and emergency rescue, the U.S. Federal Aviation Administration (FAA) and the National Aeronautics and Space Administration (NASA) have jointly developed the Unmanned Aircraft System Traffic Management System (UTM) and carried out a large number of verification tests. According to the technical level, NASA divides the operation technologies and related flight demonstration tests into four technical level phases, of which the TCL-3 and TCL-4 are the core phases of the UTM test and also the most technically complex phases. This article summarized the third and fourth phases of the flight demonstration tests of the UTM system in the United States. Based on the key technologies, the test contents and operation scenarios, as well as the relevant flight experience were summarized. Finally, some recommendations for UTM system design in China were put forward.
表1 试验特征Tab.1 Flight demonstration characteristics |
| 特征 | 描述 | 场景编号 |
|---|---|---|
| 运行密度 | 在特定空域的无人机数量 | 1、2、3、4、5 |
| 运行速度 | 在指定区域内的无人机起飞和降落次数 | 1、4、5 |
| 运行空间类别 | 基于区域的运行空间或基于交通的运行空间 | 1、2、3、4、5 |
| 空域类别 | 管制/非管制空域 | 1、2、3 |
| 地面障碍 | 建筑物附近的运行 | 1、4 |
| 障碍物类别 | 动态或静态障碍物附近的运行 | 4、5 |
| 自动起飞/降落 | 无人机起飞或降落点(同地区或远程) | 1、3、4、5 |
| 飞行配置 | 飞行任务分类,如线性检查和区域检查 | 1、2、3、4、5 |
| 起飞/着陆配置 | UAS在地面或屋顶起飞或降落 | 1、4 |
| USS协商 | USS请求修改由其他USS管理的运行 | 1、2、3、5 |
| 运行优先级 | 受导航能力限制的运行(飞行中的紧急情况)或对优先任务作出响应(公共安全) | 2、3、4 |
| 无人机远程ID | 无人机通过/不通过USS网络,由地面/空中实体进行识别 | 2、3、4 |
表2 试验事件Tab.2 Flight demonstration events |
| 类别 | 描述 | 场景编号 |
|---|---|---|
| 无人机空间保留 | 限制某些特定无人机进入的空域 | 1、2 |
| 冲突 | 无人机进入有人机、障碍物或其他无人机的限定范围内 | 1、2、3、4、5 |
| 安全着陆 | 在运行空间内/外着陆、具有可运行/不可运行安全着陆能力 | 1、2、3、4 |
| USS影响 | 一个USS中断(停止提供服务)、或者一个运行更改为另一个USS | 5 |
| 意外的无人机行为 | 无人机发生飞行事故或飞行方式粗鲁 | 4 |
| C2(命令与控制)链路中断 | 基于空中运行量、C2链路小范围或大范围中断 | 2、3、4、5 |
| 导航中断 | 基于空中运行量、导航小范围或大范围中断 | 2、3、4、5 |
| 无人机远程ID查询 | 通过/不通过USS识别无人机 | 2、3、4 |
表3 测试冗余C2系统Tab.3 Test of redundant C2 system |
| 试验区/无人机类型 | C2系统#1 | C2系统#2 | 备注 |
|---|---|---|---|
| 阿拉斯加/四旋翼 | 902~928 MHz之间的无线电通信 | 902~928 MHz之间的 无线电通信 | 每套无线电都连接到一个独立的地面站,当C2#1失效时自动切换到C2#2 |
| 阿拉斯加/四旋翼 | LTE蜂窝网络 | 902~928 MHz之间的 无线电通信 | C2#1作为主通信,当C2#1失效时自动切换到C2#2 |
| 内华达/固定翼 | 2200~2500 MHz之间的无线电通信 | 2405~1470 MHz之间的 无线电通信 | 无人机运营人手动切换 |
| 纽约/八旋翼 | 5875 MHz中心频率的Wi-Fi,20 MHz带宽 | LTE蜂窝网络 | C2#1作为主通信,当C2#1失效时自动切换到C2#2 |
| 北达科达/直升机 | 中心频率为757.5 MHz的无线电通信,以90 kHz波形运行 | 中心频率为757.5 MHz的无线电通信,以90 kHz波形运行 | 2套链路都传输所有的数据,并过滤掉重复的数据,自动合并到一个单一的接收流 |
| 北达科达/固定翼 | 902~928 MHz之间的无线电通信 | 1616~1626.5 MHz范围内的卫星通信 | C2#1作为主通信,当C2#1失效时自动切换到C2#2 |
| 北达科达/六旋翼 | 2个中心频率为915 MHz的无线电通信,分别设置为高低发射功率 | 2套不同移动服务运营商的LTE移动通信 | 自动切换到质量更高的通信链路 |
表4 TCL-3 SAA演示试验Tab.4 SAA flight demonstration of TCL-3 |
| 编号 | 试验内容 | 关键技术 |
|---|---|---|
| SAA1 | 合作型无人机空—空防撞 | DSRC |
| SAA2 | 合作型有人机/无人机空中防撞 | ADS-B in/out |
| SAA3 | 非合作型有人机/无人机空中防撞 | 机载雷达 |
| SAA4 | 非合作型有人机/无人机空—地防撞 | 地面雷达 |
图8 城市空域分层Fig.8 A concept of vertical sectionalization of the airspace in urban area areas. |
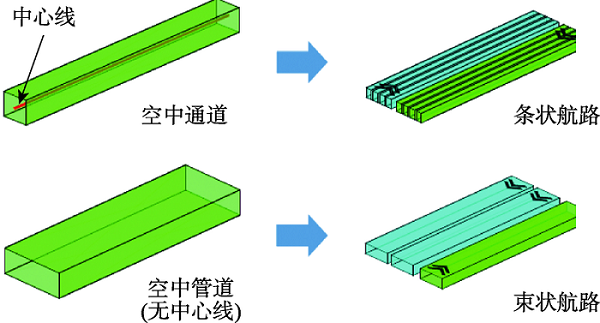
表5 基本航路结构Tab.5 Fundamental structure of flight path |
| 空域结构名称 | 特征 |
|---|---|
| A1 | 同向连贯的空中通道,融合交叉 |
| A2 | 同向连贯的空中通道,分离交叉 |
| A3 | 双向交替的空中通道,分离交叉 |
| B1 | 空中管道,融合交叉,需要信号灯 |
| B2 | 空中管道,融合交叉,需要交叉点时间管制 |
| C | 空中走廊,边界交叉点需要管制 |
表6 无人机紧急情况汇总Tab.6 Summary of UAS contingencies |
| 领域 | 细分分类 |
|---|---|
| 无人机健康监控 | 空地通信中断 无人机—无人机通信中断 无人机导航性能退化 无人机电池失效 无人机动力失效 |
| 无人机航路 | 地面动态障碍 空中静态障碍 空中动态障碍 当地危险风场 |
| 动态地理围栏设计 | 附近无人机提供的应急信息 航路沿线的高优先级应急情况 航路前方的危险风场 |
表7 通信导航应急管理要求Tab.7 Requirements of communications and navigation contingencies |
| 异常类型 | 应急要求 | 理由 |
|---|---|---|
| OSM001 | 运营人必须具备探测无人机和运营人之间通信中断的方法 | UTM系统可以使得运营人在约束条件和指令随时间变化的情况下执行任务,因此运营人必须知道是否可以与无人机进行通信 |
| OSM002 | 运营人应该采取措施获取USS已知的无人机通信中断 | USS从补充数据服务提供商获得所需的数据,当探测通信中断的方法已知时,应该能够为任务提供通信质量服务信息,进而减少在执行任务时发生通信中断的概率 |
| OSM003 | 运营人必须确定缓解无人机通信中断的步骤 | 运营人必须与无人机通信以遵守约束和指令,并且适应任务中的变化,因此必须采取缓解措施以安全地解决通信中断问题 |
| OSM004 | 运营人应该采取措施缓解USS已知的无人机通信中断 | USS接收其他运营人和其他USS的信息,应该能够支持缓解措施,从而对其服务下的总体运行影响降至最小 |
| OSM005 | 运营人必须有探测机载导航中断的方法 | UTM系统是为运营人在约束条件和指令下执行任务而建立的,因此,运营人必须了解无人机是否保持必要的导航精度和完整性来保持约束和指令 |
| OSM006 | 运营人应该采取措施探测到USS已知的无人机机载导航中断 | USS从补充数据服务提供商获得所需的数据,应该能够在已知探测机载导航中断的方法时,为任务提供通信质量服务预测信息,从而将降低在任务中发生导航中断的概率 |
| OSM007 | 运营人必须采取措施缓解无人机机载导航中断 | 为了遵守约束和跟踪指令,无人机必须保持导航性能的准确性和完整性,因此,必须采取缓解措施安全解决导航中断的问题 |
| OSM008 | 运营人应该采取措施缓解USS已知的无人机机载导航中断 | USS接收其他运营人和其他USS的信息,应该能够支持相应的缓解措施,从而将其服务范围内的整体业务影响降至最低 |
| OSM009 | 运营人必须收集异常情况数据 | 当UTM运行遇到异常情况时,必须收集数据以总结经验教训,提高运行符合性和安全性 |
表8 TCL-3飞行试验汇总Tab.8 Summary of flight demonstration in TCL-3 |
| 分组 | 试验概述 |
|---|---|
| 运行概念 | 超视距起飞着陆 突发事件管理 UTM公共接口 长时间尺度运行 未经授权空域的无人机进入和退出 |
| 数据交换 | 无人机信息报告 飞行信息管理系统故障 无人机服务供应商(USS)故障 无人机识别 USS-USS协议 气象信息服务 |
| 感知避让 | 合作型无人机空—空防撞 合作型有人机/无人机空中防撞 非合作型有人机/无人机空中防撞 空地远程识别互联 |
| 通信导航监视 | 冗余C2链路测试 GNSS导航失准测试 射频干扰检测 |
表9 TCL-4飞行试验汇总Tab.9 Summary of flight demonstration in TCL-4 |
| 分组 | 试验概述 |
|---|---|
| 运行场景 | 无人机点对点运行 无人机巡查 无人机追逐拍摄 无人机跨区域运行 无人机固定区域运行 高优先级的应急运行 |
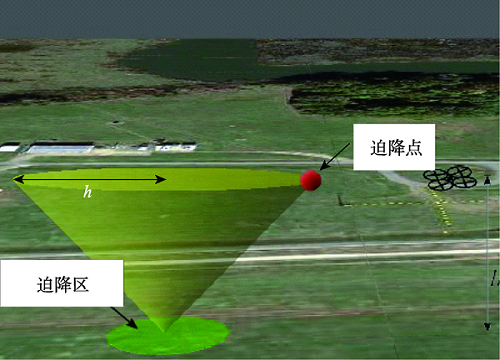
| 应急程序 | 应急航路设计 应急降落点设计 无人机应急处理程序 |
| 基于风险的应急技术 | 无人机对外通信(V2X)链路 USS空地通信链路 运行空间重叠试验 |
| 低空空域分配 | — |
| UTM系统参与方 | 普通民众 无人机服务购买方 无人机制造企业 无人机服务供应商 补充数据服务提供商 监管部门 保险 |
| [1] |
Federal Aviation Administration. Public law 112-95, title III, subtitle B: Unmanned aircraft systems[EB/OL]. 2012-02-14 [2020-12-05]. https://www.faa.gov/uas/resources/policy_library/media/Sec_331_336_UAS.pdf.
|
| [2] |
EASA. Concept of operations for drones, a risk based approach to regulation of unmanned aircraft[EB/OL]. 2015-05-01 [2020-12-05]. https://www.easa.europa.eu/sites/default/files/dfu/204696_EASA_concept_drone_brochure_web.pdf.
|
| [3] |
中国民用航空局飞行标准司. 轻小无人机运行规定(试行) [EB/OL]. 2015-12-29 [2020-12-14]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201601/P020170527591647559640.pdf.
[Civil Aviation Administration of China. Regulations on operation of light and small UAV (test). 2015-12-29 [2020-12-14]. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201601/P020170527591647559640.pdf.]
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
廖小罕. 地理科学发展与新技术应用[J]. 地理科学进展, 2020, 39(5):709-715.
[
|
| [8] |
|
| [9] |
SESAR. European drones outlook study[EB/OL]. 2017-04-21 [2020-12-20]. https://op.europa.eu/en/publication-detail/-/publication/93d90664-28b3-11e7-ab65-01aa75ed71a1/language-en/format-PDF/source-38537167#.
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
SESAR. U-space blueprint[EB/OL]. 2017-06-09 [2020-12-23]. https://www.sesarju.eu/u-space-blueprint.
|
| [15] |
刘菲, 吕人力. 民用无人机运行管理立法分析与建议[J]. 科技导报, 2020, 38(16):15-28.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
Federal Aviation Administration. Part 107-small unmanned aircraft system[EB/OL]. 2016-06-28 [2021-01-04]. https://www.ecfr.gov/cgi-bin/text-idx?SID=134a6a84e849d78e5722100ee018a452&mc=true&node=pt14.2.107&rgn=div5.
|
| [27] |
|
| [28] |
吕洋, 康童娜, 潘泉, 等. 无人机感知与规避: 概念、技术与系统[J]. 中国科学(信息科学), 2019, 49(5):520-537.
[
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}