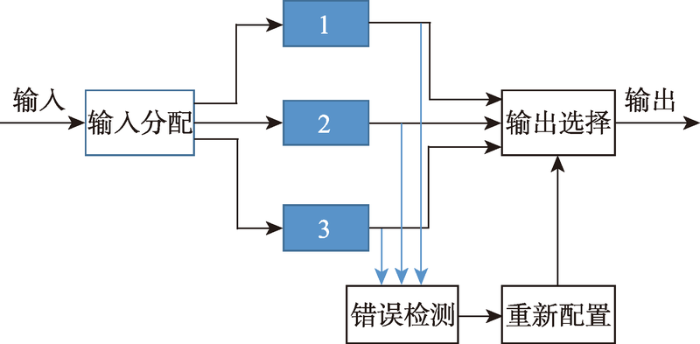
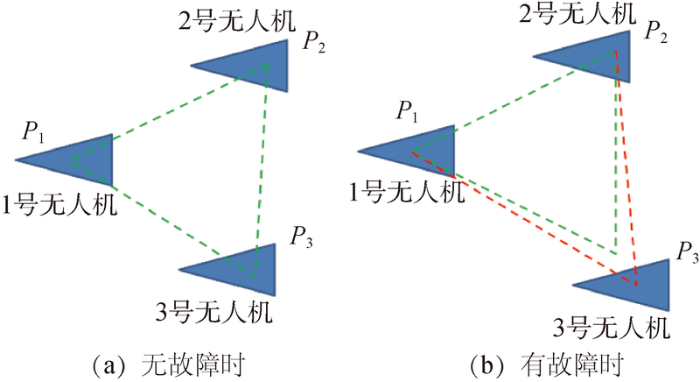
Small to medium-sized unmanned aerial vehicles (UAVs) are increasingly been used in various real time static and dynamic missions, which make them very useful tool to assist men. There are several factors which make these UAVs suitable for monitoring and survey in a wide range of conditions. Despite of all these capabilities, certain factors remain the biggest challenge for extensive use of UAVs at individual level in different real-time missions. Moreover, once prompt response to any of these constraints during the mission execution is missed, can affect the mission’s overall results, leading to partial or complete failure of the whole mission. For such purpose introduction of redundant fault-tolerance into the system is very important in order to minimize the probability of failures and increase its robustness because it is practically impossible to build a perfect system. The fundamental problem is that, as the complexity of a system increases, its reliability drastically decreases unless compensatory measures are taken. The aim of redundant fault tolerance is to introduce redundancy by adding one or more modules as back-up usually in parallel configuration. To improve the robustness and success rate of UAV network systems for aerial remote sensing missions under extreme conditions, this paper introduced the redundancy-based fault-tolerance control technology into UAVs networking designs, and determined the best networking solutions with different restrictions. The devised networking design includes multi-UAV network with active cooperation through simultaneous monitoring during remote sensing missions such as "large-scale ecological monitoring," "medium-scale flood disaster monitoring," and "fine-scale security surveillance" under different observation conditions. The multi-UAV network serve as redundant fault-tolerant architecture where system could be fault tolerant through adding more than one UAVs as back-up. Scenarios set for the redundant fault-tolerance are UAVs position and viewing angle during different extreme conditions. The UAV(s) in network scheme is considered faulty when its position and viewing angle exceeds the set threshold and would be separated and not considered for further analysis. Only in this way, we can get effective output of the networking control solutions under extreme conditions to ensure that missions can be carried out smoothly.
无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务。例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用。此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]。
(2017). Use of unmanned aerial vehicles in monitoring application and management of natural hazards. Geomatics, Natural Hazards and Risk: Vol. 8, No. 1, pp. 1-4. doi: 10.1080/19475705.2017.1315619
[16]
Martínez de Dios R J.
Fleets of small unmanned aerial systems for forest fire applications
Humanitarian assistance operates under conditions characterized by the collapse of health facilities, the disruption of health systems and the breakdown of already on-going treatments in case of emergency. In addition to these circumstances, aid agencies in developing countries are often confronted with poor or non xistent infrastructure that is further disrupted in case of disasters, i.e., destroyed roads and debris-covered areas which hinder medical teams in reaching remote locations. As the supply via trucks and helicopters is not applicable in this situation, alternative means of transport have to be considered. Unmanned aerial vehicles (UAVs) are receiving increased attention by humanitarian organizations as they can help overcoming last-mile distribution problems, i.e., inaccessibility to cut-off regions. This paper considers drone applications in last-mile distribution in humanitarian logistics and presents an optimization model for the delivery of multiple packages of light-weight relief items (e.g. vaccine, water purification tablets, etc.) via drones to a certain number of remote locations within a disaster prone area. The objective of the model is to minimize the total traveling distance (or time/cost) of the drone under payload and energy constraints while recharging stations are installed to allow the extension of the operating distance of the drone. The implementation of different priority policies is discussed. The model is solved as a mixed integer linear program and illustrated numerically with different scenarios.
[20]
Griffin GF.
The use of unmanned aerial vehicles for disaster management
ABSTRACT This paper discusses potential applications of unmanned aerial vehicles (UAVs) for disaster man age ment. Based on the current state and diversity of research, there is considerable evidence to sup port the strategic investment in UAV technology to develop new and enhance existing operational capabilities. When developing these capabilities, it is essential that officials understand a range of vari ables that will influence the development of a concept of operations for particular types of disasters. As the technical capabilities of UAVs exceed the permissible use of this technology, public safety officials and agencies will have to work closely with national airspace regulators to ensure that these responses are safe and do not endanger other aircraft. The community attitude and perceived risks will also influ ence the potential use of UAVs for disaster management. It is essential that officials address these concerns and build in safeguards to protect against any breaches of privacy and individual rights.
[21]
HerediaG, CaballeroF, MazaI, et al.
Multi-unmanned aerial vehicle (UAV) cooperative fault detection employing differential global positioning (DGPS), inertial and vision sensors
[J].International Journal of Engineering Technology Science and Research IJETSR , 2016,3(6). [Online] Ijetsr.com. Available at:[Accessed 23 Dec. 2018].
Disaster monitoring and management by the unmanned aerial vehicle technology
[C].In: ISPRS Technical Commission VII Symposium 100 Years ISPRS Advancing Remote Sensing Science. [online] Vienna: Institute of Photogrammetry and Remote Sensing, Vienna University of Technology 2010:1-6. (Online Available) [Accessed 8 Nov.2018]
Construction of emergency mapping system for vehicle drones
[C]// 12th meeting of China Association for Science and Technology Annual Conference - Symposium on Disaster and Emergency Management of Surveying and Mapping Services, 2011.
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
UAV photogrammetry for mapping and 3D modeling-Current status and future perspectives
Unmanned aerial vehicle remote sensing for field-based crop phenotyping: current status and perspectives
1
2017
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Multipurpose UAV for search and rescue operations in mountain avalanche events
1
2016
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Using unmanned aerial vehicles in search & rescue operations
1
2015
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
The American
1
2018
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Secure utilization of beacons and UAVs in emergency response systems for building fire hazard
1
2017
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Use of unmanned aerial vehicles in monitoring application and management of natural hazards
1
2017
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Fleets of small unmanned aerial systems for forest fire applications
1
2015
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
Efficient forest fire detection index for application in unmanned aerial systems (UASs)
1
2016
... 无人机作为一种动态工具,可帮助人类在不同的应用领域执行不同的任务.例如,Themistocleous[6]使用各种无人机平台在不同区域使用可见光、多光谱和超光谱摄像机进行环境和考古应用;Yang等[10]以无人机作为遥感平台(UAV-RSPS),配备不同的农业传感器,用于监测植物高度、叶色、叶面积指数(LAI)、叶绿素含量、生物量、大面积产量等表型参数,并尽可能少地进行田间试验,从而取得了高度可靠的结果;Silvagni等[11]成功地将基于多旋翼无人机的可见光和热红外探测应用在雪山救援行动中;Tomotani[12]和Karaca等[13]利用无人机平台,使用不同的搜索算法进行了搜索和救援操作;Seo等[14]还提出了一种在物联网(Internet of Technology)安全平台上利用信标和无人机在建筑物里进行救援和疏散的监测和应急响应方法,称为UAV-EMOR(UAV-assisted Emergency Monitoring and Response)系统;Giordan等[15]通过收集大量案例进行研究,提供了一系列通过使用无人机平台评估的自然灾害监测和管理应用.此外,通过无人机平台可监测比固定监测系统更广泛的区域,比在直升机或卫星上实施的常规系统更具成本效益[16,17]. ...
 , 晏磊, 冯朝晖, 赵海盟, 孙逸渊, 赵红颖
, 晏磊, 冯朝晖, 赵海盟, 孙逸渊, 赵红颖
{kind=link}
{kind=link}
{kind=link}
{kind=link}