1 引言
城市的基本测度是城市规模,但如何有效地确定城市规模依然是地理学的一个难题。Davis曾经指出:“当我们提到城市人口时,必须记住一个事实:我们的数据并不反映严格可比的地域单元(Davis, 1978 ; 引自陈彦光, 2008b )。”城市地域范围定义的不同会影响关于城市活动统计分析的结论(Rozenfeld et al, 2008 )。计量城市规模的前提之一是明确定义城市的边界。只有有效地界定地域范围并客观确定城市规模(陈彦光, 2008b),研究与统计所得出的结论才能真实地反映城市的特征。然而,中国地理学界对于城市地域范围的理解也是百家争鸣,使得城市边界的确定举步维艰。传统的城市地域概念包括三种:城区(City Proper,CP)、城市化地区(Urbanized Areas,UA)和都市区(Metropolitan Areas,MA)(陈彦光, 2008b)。如今城市化地区有被城市集聚体取代的趋势。如何客观地将城市地域进行划分归类依然缺少行之有效的方法。近年来,一些西方学者另辟蹊径,尝试以自组织的视角,从构成城市的微观实体出发定义城市,并以此为据确定城市的范围。根据自组织系统的定义,城市可以看成是由一些基本实体(如建筑物和人)组成的一个自组织系统,并以自下而上的方式实现有机增长(Portugali, 1999 )。西方确定城市边界的方法中,最具代表性的是Rozenfeld等(2008, 2009)提出的城市集群算法(City Cluster Algorithm,CCA)和Tannier等(2011)提出的利用分形特征确定城市边界的方法。本文参考Tannier等(2011)和Rozenfeld等(2008)的城市边界识别方法,提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法。该方法以自组织的角度,探讨遥感图像中地块像元之间的相互作用范围,并利用分形思想客观地确定城市的地域范围。最后本文以北京城市建设用地形态为例,具体说明如何利用该方法识别城市的边界。
2 研究方法与数据来源
2.1 研究方法
2.1.1 城市集群算法
城市集群算法原则上是一种确定人口集聚范围的算法,之所以将其归入城市边界识别方法之中,是因为城市集群算法抓住了人口集聚这一城市的主要特征。假定城市是彼此相邻的人口地理单元的集合,人口集群的范围也就自然而然地代表了城市地理空间的范围。
城市集群算法的主要思路如下:若已知某一特定的时间内栅格图像中每个像元内的人口数,则选取该栅格数据中的任意一个人口像元作为搜索的初始像元,就可以对其冯诺伊曼邻位(Von Neumann Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 )区域进行搜索。若其冯诺伊曼邻位的某一像元的人口数不为0,则将此像元与初始人口像元合并成一个集群。按照此准则迭代搜索,直至下一次搜索不再存在人口像元为止(Rozenfeld et al, 2008 )。因此,城市集群算法的本质是一种邻域搜索法。
矢量方法与栅格方法的原理类似。此后,Rozenfeld等(2009) 提出一种应用于矢量点图像的城市集群算法,Jia等(2010) 基于城市街道节点数据,利用该方法实现了城市边界的识别。
2.1.2 分形建模法
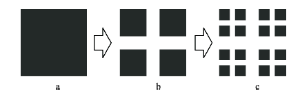
Tannier等(2011)认为,城市不仅具有分形特征,而且城市内部的形态结构类似福尼尔尘埃(Fournier Dusts),其空间组织形式如图1 所示(Frankhauser, 2008 )。
若将图1 中黑色的方块看作是建筑群或者是街区,将中间白色的间隔看作街道,那么福尼尔尘埃与我们今天所居住的城市的组织形式确实存在着一定的相似性。这些空白间隔的尺寸和空间分布并非杂乱无章,而是遵循一定的规律。首先,空白间隔的尺寸越大,其数量就越少,反之亦然。进一步分析可知,空白间隔的数量与其尺寸之间存在着较强的等级规律,并且空白间隔的数量与相应规模的集群数量之间也存在着一定的比例关系。若现实中的城市符合福尼尔尘埃的组织形式,那么城市形态也应具有与福尼尔尘埃相似的分形特征(Frankhauser, 2008 )。但由于城市形态十分复杂,且能够准确地反映街道的分布和规模的数据难以获取,因此,Tannier等(2011)利用城市建筑物的矢量分布数据,借助明可夫斯基扩张法(Minkowshi's Dilation)度量城市的分形特征,最后利用分形特征来确定城市的有效边界。
图1 福尼尔尘埃(Fournier Dusts )演化示意图(分维D =1.7227)
Fig.1 Fractal evolution of Fournier Dusts (fractal dimension D =1.7227)
2.1.3 基于邻域扩展量化的城市边界识别方法
遥感图像具有较好的实时性,使其成为地理分析中最常用的一种数据源。遥感图像本质上是一种栅格图像,栅格图像分析最常用的邻域范围为冯诺伊曼邻域和摩尔邻域(Moore Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 ) 。然而城市地域单元反映在遥感图像上,其作用范围可能并非仅限于传统的冯诺伊曼邻域和摩尔邻域 ,因此本文提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法。
所谓邻域扩展量化,是指对栅格图像邻域分析范围进行扩展和量化。由于栅格图像数据组织的特殊性,更大范围的邻域往往采用阶数进行定义。但传统的阶数定义方式往往会损失掉一些邻域形态变化的细节,且邻域的范围也难以量化。本文将矢量邻域分析的思想运用在栅格图像上,既可以保存全部的邻域形态变化特征,又能够将邻域范围量化,便于后续的定量分析。
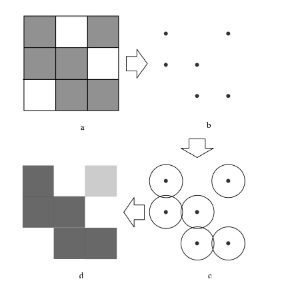
该方法的主要思路如图2 所示:一是将栅格图像转换成由像元几何中心组成的格点分布;二是分别以每个点为圆心,作半径为r 的搜索区域;三是以搜索区域是否相交作为像元是否融合的判断依据,并对符合条件的像元进行融合。
图2 栅格图像像元集群示意图
Fig.2 The principle of cell clustering in raster image
利用邻域扩展量化方法改变每个像元的搜索区域范围,其融合集群的数目也会相应地改变。由于城市地理现象具有无尺度性,城市形态具有分形特征,理论上不能够找到特征尺度对城市的边界进行度量(陈彦光, 2003 ),即搜索半径r 与集群数目N 在全尺度范围内呈现良好的双对数线性关系。但现实中城市的形态并不遵循规则的分形结构,而是一种类似于前分形(Prefractals)的复杂格局,在一定尺度范围内具有统计分形特征。毕竟地理规律是一种演化的规律,而不是存在的规律(陈彦光, 2008a )。地理分形是通过自组织过程逐步演化出来的(Portugali, 1999 ; Benguigui et al, 2000 )。不适当的城市管理对分形结果的发育会造成负面影响。因此,通过统计分析搜索半径r 与集群数目N 的双对数曲线,实际上仅在一定尺度范围找到分形特性。基于以上思想,可以利用双对数曲线标度区的范围来界定空间微观实体的有效作用范围,从而确定城市的地域边界。
2.2 研究区及数据源
考虑到遥感数据的投影一致性以及提取建成区形态的准确性,尽量减少其他因素所造成的误差。本文所采用的数据分别为1988、1992、1999、2006年北京地区(39.3°~41.3°N,115.3°~118.2°E)Landsat遥感图像,分辨率为30 m。利用监督分类的方法,将用地类型分为五大类:建设用地、覆盖农田、裸露农田、水体和山地,对应于每一种用地类型,分别选取了200个训练样本和100个检验样本。4个年份监督分类的Kappa系数均在0.9以上,全局精度均在90%以上。由于北京一些远郊区的建设用地距离主城区较远,对于城市边界识别的意义不大。本文只截取北至清河、上地,南至义和庄、南苑机场,东至通州东六环,西至门头沟西辛房的主城区及部分近郊区作为研究区,研究区涵盖了市域的规划范围。一个地区建设用地的空间分布一定程度上反映了该地区人类活动的空间分布,因此本文主要利用研究区建设用地的空间分布来确定北京地区的城市边界。
3 结果与分析
城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度。因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围。表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变。因此,只有确定搜索半径,才能确定城市的边界。然而,对于搜索半径的讨论却鲜有所闻。城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论。Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围。这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中。此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差。基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法。
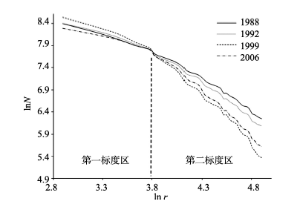
城市形态的演变是一种循序渐进的过程,都是在前一时刻的形态基础上发生变化,这就意味着不同年份的城市形态分形特征虽不完全相同,但应有一定的相似之处。图3 为北京地区集群数目与搜索半径的双对数曲线图,其中每条曲线对应32个测量值。仔细观察可以发现,4个年份的曲线不仅形态十分相似,且均在某处发生了斜率位序的变化。将4个年份的双对数曲线的统计结果进行比较可以发现,总体的双对数线性拟合效果逐年下降。这说明双对数曲线正逐渐背离线性形态,城市形态的规则分形特征正逐渐消失。然而,若以斜率发生位序变化的点为界,将前5个测量值归为一类,后27个测量值归为另一类,那么各子类的线性特征保持良好,如表2 所示。前者的拟合优度R 2 均在0.984以上,后者的拟合优度R 2 均在0.990以上,而且同一年份两者斜率值相差显著。由此可知,前5个测量值及后27个测量值各具有一定的线性关系,且两者的线性特征显著不同。若城市形态严格服从分形特征,其搜索半径r 值与集群数目N 的双对数曲线应为线性。以此作为判断标准,则可以将曲线分为至少2个标度区,即前5个测量值构成一个标度区,后27个观测值属于另一个标度区。
图3 搜索区域半径(r )与集群数量(N )的标度区分界图
Fig.3 Demarcation of scaling range based on search radius r and the number of clusters N
第5个测量值对应的搜索半径约为45 m。对应于北京的城市形态而言,当搜索半径r 为15~45 m时,城市形态呈现同一种分形特征;当搜索半径大于45 m时,北京原城市形态的分形特征被破坏,呈现出另一种分形特征。这意味着,北京城市形态可能具有类似双分形(Bi-fractal)( White et al, 1993 , 1994 ; 刘继生等, 1999 ) 的结构特征。这种形态特征变化的合理解释是,城市区相对于非市区而言,其内部实体密度较大。若城市实体的分布服从分形结构,那么在城市区域内,由实体形成的集群数量的改变随搜索半径的改变会呈现出一定的规律性。对于城市以外的地区,由于其实体密度较小,若搜索半径改变的程度与城市区域相同,其实体所形成的集群数量相较城市区域会呈现出显著的差异。因此城市形态分形特征的改变很可能是由于搜索半径的增大包含了城乡结合区和乡村的实体而出现的。如表2 所示,双对数曲线线性拟合斜率的绝对值并不呈现逐年单一的变化,而是先增长后下降,这反映了北京城市形态分布的演变特征。斜率绝对值的大小与集群分布的密度有关,即集群数目变化对于搜索半径变化的敏感程度。1988-1999年,北京地区建成区分布的增长模式类似于卫星城增长模式,此时集群的数目增多,密度增大,集群数目变化对于圆形邻域半径变化的敏感程度增大。1999-2006年,北京地区建设用地分布呈现一种集聚的特征,即部分集群规模不断扩张,与邻近集群融合并形成同一集群,此时集群数目不断减少。但由于距离相对较远的一些集群无法进行合并,集群数目变化对圆形邻域半径变化的敏感程度下降。
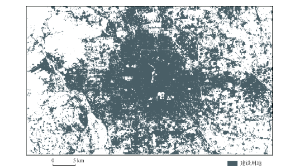
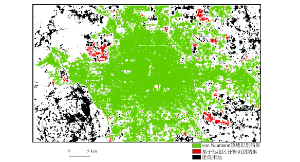
以第一个标度区的范围作为圆形邻域半径的确定标准,以像元作为基本单元进行考虑,每个像元的有效作用邻域范围如图4 所示。这一结果也说明了遥感图像城市边界识别的像元有效作用邻域范围并非传统的冯诺伊曼邻域。图5 为利用监督分类方法提取的2006年北京地区建设用地分布状况。基于图4 邻域范围所得的2006年城市边界识别结果如图6 所示。其中绿色部分代表采用传统城市集群算法得到的识别结果,红色部分代表基于邻域扩展量化法得到的补充结果,黑色部分为不属于城市区域范围的建设用地。若将地理空间的相互作用关系理解为仅受到距离衰减效应的影响,那么非接壤的地理空间也存在一定的相互作用,只是在影响程度上有所差别。城市正是由不同地理单元依靠有效的空间相互作用组成的庞大聚落。城市集群算法则将地理空间相互作用的有效影响范围直接限定为地理接壤,并未经过严格的科学论证。本文从城市形态的分形角度,利用标度概念界定了地理空间相互作用的有效影响范围,该范围并非仅限于地理接壤。图6 中红色区域正是一些与绿色区域非接壤,但根据分形理论应属于城市区的部分。
图4 像元有效作用范围示意图
Fig.4 The effective range of a raster pixel
图5 2006年北京地区建设用地分布状况
Fig.5 Distribution of built areas in Beijing in 2006
图6 2006年北京地区城市边界识别结果
Fig.6 Result of Beijing urban boundary identification in 2006
4 讨论与结论
4.1 讨论
城市地域范围的确定无论对于城市地理学家还是城市规划人员而言都是一项挑战(Rozenfeld et al, 2008 ) 。缺少了对有效城市地域范围的讨论,那么城市研究的种种结论将无法真实地反映现实中城市的发展与演变规律。因此,确定城市的地域边界迫在眉睫。在Tannier等(2011)和Rozenfeld等(2008)人提出的西方城市边界识别方法的启发下,本文提出了一种基于邻域扩展量化的遥感图像城市边界识别方法,相比文中介绍的西方城市边界识别方法,其优点十分明显。例如,相对于Tannier等(2011)以及Jia等(2010)提出的矢量方法,其优点之一是数据获取相对容易。Tannier等(2011)的分形方法所采用的数据是城市建筑物分布的矢量数据,Jia等(2010)的自然城市边界识别所采用的数据是街道节点和街区分布的矢量数据,而对于北京这样的巨型城市而言,此类数据的获取几乎是不可能的;即使有相应的数据,也难以保证其不会存在一些细节的丢失。二是该方法采用的遥感数据具有很好的实时性。中国城市的矢量数据通常来自于测绘部门,其对城市数据的更新往往需要很长的周期,而遥感数据良好的实时性可以保证城市边界的识别结果的及时更新并易于进行时间序列分析。此外,相较于Rozenfeld等(2008)提出的栅格方法,本方法的优点如下:一是基于邻域扩展量化的城市边界识别方法不需设定初始像元,可以同时进行多个集群的边界识别;二是量化了栅格图像像元的邻域范围,便于进行数据分析;三是城市集群算法,无论是矢量方法还是栅格方法均无法客观地确定搜索区域的范围,从而使最后的识别结果带有一定的主观性。而基于邻域扩展量化的城市边界识别方法通过对不同邻域范围的识别结果进行综合分析,能客观地确定基本单元的有效邻域范围,一定程度上消除城市边界识别结果的主观性。
4.2 结论
利用该方法对北京城市建设用地形态进行研究,结论如下:①基于邻域扩展量化的城市边界识别方法是一种栅格数据的处理方法。其主要思想是以矢量图像邻域的视角处理栅格像元的邻域,以像元几何中心的相对位置关系确定其邻域范围。②利用该方法通过扩大圆形区域的搜索半径,在栅格图像处理上不仅可以实现传统的邻域范围搜索,还可以将邻域的范围扩展至任意阶次。此外,该方法量化了栅格像元的邻域范围,便于揭示遥感图像城市用地形态的分形特征。③通过对北京4个年份的建设用地形态进行分析,利用邻域范围与建成用地集群数目之间的数量关系,揭示了北京地区建成用地的双标度特征。④根据北京建设用地的分形特征,以标度区的范围作为判别依据,本文发现了像元的有效作用邻域范围并非传统的冯诺伊曼邻域,并基于该邻域范围提取了北京地区的城市边界。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
陈彦光 . 2003 . 中国的城市化水平有多高?城市地理研究为什么要借助分形几何学
[J]. 城市规划 , 27 (7 ): 12 -17 .
[本文引用: 1]
[Chen Y G. 2003 . What is the urbanization level of China
[J]. City Planning Review, 27(7): 12-17.].
[本文引用: 1]
[2]
陈彦光 . 2008 a. 分形城市系统: 标度·对称·空间复杂性 [M]. 北京 : 科学出版社 .
[Chen Y G. 2008 a. Fractal urban systems: scaling·symmetry·spatial complexity [M]. Beijing, China : Science Press .].
[3]
陈彦光 . 2008 b. 三个城市地域概念辨析
[J]. 城市发展研究 , 15 (2 ): 81 -84 .
[Chen Y G. 2008 b. Distinguishing three spatial concepts of cities by using the idea from system science
[J]. Urban Studies, 15(2): 81-84.].
[4]
陈彦光 , 周一星 . 2000 . 细胞自动机与城市系统的空间复杂性模拟: 历史、现状与前景
[J]. 经济地理 , 20 (3 ): 35 -39 .
[本文引用: 2]
[Chen Y G Zhou Y X. 2000 . Cellular automata and simulation of spatial complexity of urban systems: history, present situation and future
[J]. Economic Geography , 20 (3 ): 35 -39 .].
[本文引用: 2]
[5]
刘继生 , 陈彦光 . 1999 . 东北地区城市规模分布的分形特征
[J]. 人文地理 , 14 (3 ): 1 -6 .
[本文引用: 2]
[Liu J S Chen Y G. 1999 . A preliminary study of fractal features of size distribution of cities in Northeast China
[J]. Human Geography , 14 (3 ): 1 -6 .].
[本文引用: 2]
[6]
Batty M Couclelis H Eichen M. 1997 . Urban systems as cellular automata
[J]. Environment & Planning B: Planning & Design , 24 (2 ): 159 -164 .
[本文引用: 2]
[7]
Benguigui L Czamanshi D Marinov M et al. 2000 . When and where is a city fractal
[J]. Environment & Planning B: Planning & Design , 27 (4 ): 507 -519 .
[本文引用: 1]
[8]
Davis K. 1978 . World urbanization, 1950-70 [M]//Bourne L S , Simmons J W. Systems of cities: readings on structure, growth, and policy. New York, NY: Oxford University Press .
[本文引用: 1]
[9]
Frankhauser P. 2008 . Fractal geometry for measuring and modelling urban patterns
[M]//Albeverio S, Andrey D, Giordano P, et al. The dynamics of complex urban systems: an interdisciplinary approach. Heidelberg, Germany: Physica-Verlag.
[本文引用: 2]
[10]
Jia T Jiang B. 2010 . Measuring urban sprawl based on massive street nodes and the novel concept of natural cities
[J]. Geodesy & Geoinformatics, arXiv: 1010 .0541 .
[本文引用: 1]
[11]
Lowe D G. 1989 . Organization of smooth image curves at multiple scales
[J]. International Journal of Computer Vision , 3 (2 ): 119 -130 .
[12]
Portugali J. 1999 . Self-organization and the city
[M]. New York, NY: Springer.
[本文引用: 2]
[13]
Rozenfeld H D Rybski D Andrade J S Jr et al. 2008 . Laws of population growth
[J]. Proceedings of the National Academy of Sciences of the United States of America , 105 (48 ): 18702 -18707 .
[本文引用: 4]
[14]
Rozenfeld H D Rybski D Gabaix X et al. 2009 . The area and population of cities: new insights from a different perspective on cities
[J]. General Information , 101 (5 ): 2205 -2225 .
[本文引用: 1]
[15]
Tannier C Thomas I Vuidel G et al. 2011 . A fractal approach to identifying urban boundaries
[J]. Geographical Analysis , 43 (2 ): 211 -227 .
[16]
White R Engelen G. 1993 . Cellular automata and fractal urban form: a cellular modelling approach to the evolution of urban land-use patterns
[J]. Environment and Planning A , 25 (8 ): 1175 -1199 .
[本文引用: 2]
[17]
White R Engelen G. 1994 . Urban systems dynamics and cellular automata: fractal structures between order and chaos
[J]. Chaos, Solitons & Fractals , 4 (4 ): 563 -583 .
[本文引用: 2]
中国的城市化水平有多高?城市地理研究为什么要借助分形几何学
1
2003
... 利用邻域扩展量化方法改变每个像元的搜索区域范围,其融合集群的数目也会相应地改变.由于城市地理现象具有无尺度性,城市形态具有分形特征,理论上不能够找到特征尺度对城市的边界进行度量(陈彦光, 2003 ),即搜索半径r 与集群数目N 在全尺度范围内呈现良好的双对数线性关系.但现实中城市的形态并不遵循规则的分形结构,而是一种类似于前分形(Prefractals)的复杂格局,在一定尺度范围内具有统计分形特征.毕竟地理规律是一种演化的规律,而不是存在的规律(陈彦光, 2008a ).地理分形是通过自组织过程逐步演化出来的(Portugali, 1999 ; Benguigui et al, 2000 ).不适当的城市管理对分形结果的发育会造成负面影响.因此,通过统计分析搜索半径r 与集群数目N 的双对数曲线,实际上仅在一定尺度范围找到分形特性.基于以上思想,可以利用双对数曲线标度区的范围来界定空间微观实体的有效作用范围,从而确定城市的地域边界. ...
中国的城市化水平有多高?城市地理研究为什么要借助分形几何学
1
2003
... 利用邻域扩展量化方法改变每个像元的搜索区域范围,其融合集群的数目也会相应地改变.由于城市地理现象具有无尺度性,城市形态具有分形特征,理论上不能够找到特征尺度对城市的边界进行度量(陈彦光, 2003 ),即搜索半径r 与集群数目N 在全尺度范围内呈现良好的双对数线性关系.但现实中城市的形态并不遵循规则的分形结构,而是一种类似于前分形(Prefractals)的复杂格局,在一定尺度范围内具有统计分形特征.毕竟地理规律是一种演化的规律,而不是存在的规律(陈彦光, 2008a ).地理分形是通过自组织过程逐步演化出来的(Portugali, 1999 ; Benguigui et al, 2000 ).不适当的城市管理对分形结果的发育会造成负面影响.因此,通过统计分析搜索半径r 与集群数目N 的双对数曲线,实际上仅在一定尺度范围找到分形特性.基于以上思想,可以利用双对数曲线标度区的范围来界定空间微观实体的有效作用范围,从而确定城市的地域边界. ...
细胞自动机与城市系统的空间复杂性模拟: 历史、现状与前景
2
2000
... 城市集群算法的主要思路如下:若已知某一特定的时间内栅格图像中每个像元内的人口数,则选取该栅格数据中的任意一个人口像元作为搜索的初始像元,就可以对其冯诺伊曼邻位(Von Neumann Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 )区域进行搜索.若其冯诺伊曼邻位的某一像元的人口数不为0,则将此像元与初始人口像元合并成一个集群.按照此准则迭代搜索,直至下一次搜索不再存在人口像元为止(Rozenfeld et al, 2008 ).因此,城市集群算法的本质是一种邻域搜索法. ...
... 遥感图像具有较好的实时性,使其成为地理分析中最常用的一种数据源.遥感图像本质上是一种栅格图像,栅格图像分析最常用的邻域范围为冯诺伊曼邻域和摩尔邻域(Moore Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 ) .然而城市地域单元反映在遥感图像上,其作用范围可能并非仅限于传统的冯诺伊曼邻域和摩尔邻域 ,因此本文提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法. ...
细胞自动机与城市系统的空间复杂性模拟: 历史、现状与前景
2
2000
... 城市集群算法的主要思路如下:若已知某一特定的时间内栅格图像中每个像元内的人口数,则选取该栅格数据中的任意一个人口像元作为搜索的初始像元,就可以对其冯诺伊曼邻位(Von Neumann Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 )区域进行搜索.若其冯诺伊曼邻位的某一像元的人口数不为0,则将此像元与初始人口像元合并成一个集群.按照此准则迭代搜索,直至下一次搜索不再存在人口像元为止(Rozenfeld et al, 2008 ).因此,城市集群算法的本质是一种邻域搜索法. ...
... 遥感图像具有较好的实时性,使其成为地理分析中最常用的一种数据源.遥感图像本质上是一种栅格图像,栅格图像分析最常用的邻域范围为冯诺伊曼邻域和摩尔邻域(Moore Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 ) .然而城市地域单元反映在遥感图像上,其作用范围可能并非仅限于传统的冯诺伊曼邻域和摩尔邻域 ,因此本文提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法. ...
东北地区城市规模分布的分形特征
2
1999
... 城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度.因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围.表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变.因此,只有确定搜索半径,才能确定城市的边界.然而,对于搜索半径的讨论却鲜有所闻.城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论.Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围.这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中.此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差.基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法. ...
... 第5个测量值对应的搜索半径约为45 m.对应于北京的城市形态而言,当搜索半径r 为15~45 m时,城市形态呈现同一种分形特征;当搜索半径大于45 m时,北京原城市形态的分形特征被破坏,呈现出另一种分形特征.这意味着,北京城市形态可能具有类似双分形(Bi-fractal)( White et al, 1993 , 1994 ; 刘继生等, 1999 ) 的结构特征.这种形态特征变化的合理解释是,城市区相对于非市区而言,其内部实体密度较大.若城市实体的分布服从分形结构,那么在城市区域内,由实体形成的集群数量的改变随搜索半径的改变会呈现出一定的规律性.对于城市以外的地区,由于其实体密度较小,若搜索半径改变的程度与城市区域相同,其实体所形成的集群数量相较城市区域会呈现出显著的差异.因此城市形态分形特征的改变很可能是由于搜索半径的增大包含了城乡结合区和乡村的实体而出现的.如表2 所示,双对数曲线线性拟合斜率的绝对值并不呈现逐年单一的变化,而是先增长后下降,这反映了北京城市形态分布的演变特征.斜率绝对值的大小与集群分布的密度有关,即集群数目变化对于搜索半径变化的敏感程度.1988-1999年,北京地区建成区分布的增长模式类似于卫星城增长模式,此时集群的数目增多,密度增大,集群数目变化对于圆形邻域半径变化的敏感程度增大.1999-2006年,北京地区建设用地分布呈现一种集聚的特征,即部分集群规模不断扩张,与邻近集群融合并形成同一集群,此时集群数目不断减少.但由于距离相对较远的一些集群无法进行合并,集群数目变化对圆形邻域半径变化的敏感程度下降. ...
东北地区城市规模分布的分形特征
2
1999
... 城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度.因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围.表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变.因此,只有确定搜索半径,才能确定城市的边界.然而,对于搜索半径的讨论却鲜有所闻.城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论.Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围.这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中.此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差.基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法. ...
... 第5个测量值对应的搜索半径约为45 m.对应于北京的城市形态而言,当搜索半径r 为15~45 m时,城市形态呈现同一种分形特征;当搜索半径大于45 m时,北京原城市形态的分形特征被破坏,呈现出另一种分形特征.这意味着,北京城市形态可能具有类似双分形(Bi-fractal)( White et al, 1993 , 1994 ; 刘继生等, 1999 ) 的结构特征.这种形态特征变化的合理解释是,城市区相对于非市区而言,其内部实体密度较大.若城市实体的分布服从分形结构,那么在城市区域内,由实体形成的集群数量的改变随搜索半径的改变会呈现出一定的规律性.对于城市以外的地区,由于其实体密度较小,若搜索半径改变的程度与城市区域相同,其实体所形成的集群数量相较城市区域会呈现出显著的差异.因此城市形态分形特征的改变很可能是由于搜索半径的增大包含了城乡结合区和乡村的实体而出现的.如表2 所示,双对数曲线线性拟合斜率的绝对值并不呈现逐年单一的变化,而是先增长后下降,这反映了北京城市形态分布的演变特征.斜率绝对值的大小与集群分布的密度有关,即集群数目变化对于搜索半径变化的敏感程度.1988-1999年,北京地区建成区分布的增长模式类似于卫星城增长模式,此时集群的数目增多,密度增大,集群数目变化对于圆形邻域半径变化的敏感程度增大.1999-2006年,北京地区建设用地分布呈现一种集聚的特征,即部分集群规模不断扩张,与邻近集群融合并形成同一集群,此时集群数目不断减少.但由于距离相对较远的一些集群无法进行合并,集群数目变化对圆形邻域半径变化的敏感程度下降. ...
Urban systems as cellular automata
2
1997
... 城市集群算法的主要思路如下:若已知某一特定的时间内栅格图像中每个像元内的人口数,则选取该栅格数据中的任意一个人口像元作为搜索的初始像元,就可以对其冯诺伊曼邻位(Von Neumann Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 )区域进行搜索.若其冯诺伊曼邻位的某一像元的人口数不为0,则将此像元与初始人口像元合并成一个集群.按照此准则迭代搜索,直至下一次搜索不再存在人口像元为止(Rozenfeld et al, 2008 ).因此,城市集群算法的本质是一种邻域搜索法. ...
... 遥感图像具有较好的实时性,使其成为地理分析中最常用的一种数据源.遥感图像本质上是一种栅格图像,栅格图像分析最常用的邻域范围为冯诺伊曼邻域和摩尔邻域(Moore Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 ) .然而城市地域单元反映在遥感图像上,其作用范围可能并非仅限于传统的冯诺伊曼邻域和摩尔邻域 ,因此本文提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法. ...
When and where is a city fractal
1
2000
... 利用邻域扩展量化方法改变每个像元的搜索区域范围,其融合集群的数目也会相应地改变.由于城市地理现象具有无尺度性,城市形态具有分形特征,理论上不能够找到特征尺度对城市的边界进行度量(陈彦光, 2003 ),即搜索半径r 与集群数目N 在全尺度范围内呈现良好的双对数线性关系.但现实中城市的形态并不遵循规则的分形结构,而是一种类似于前分形(Prefractals)的复杂格局,在一定尺度范围内具有统计分形特征.毕竟地理规律是一种演化的规律,而不是存在的规律(陈彦光, 2008a ).地理分形是通过自组织过程逐步演化出来的(Portugali, 1999 ; Benguigui et al, 2000 ).不适当的城市管理对分形结果的发育会造成负面影响.因此,通过统计分析搜索半径r 与集群数目N 的双对数曲线,实际上仅在一定尺度范围找到分形特性.基于以上思想,可以利用双对数曲线标度区的范围来界定空间微观实体的有效作用范围,从而确定城市的地域边界. ...
1
1978
... 城市的基本测度是城市规模,但如何有效地确定城市规模依然是地理学的一个难题.Davis曾经指出:“当我们提到城市人口时,必须记住一个事实:我们的数据并不反映严格可比的地域单元(Davis, 1978 ; 引自陈彦光, 2008b ).”城市地域范围定义的不同会影响关于城市活动统计分析的结论(Rozenfeld et al, 2008 ).计量城市规模的前提之一是明确定义城市的边界.只有有效地界定地域范围并客观确定城市规模(陈彦光, 2008b),研究与统计所得出的结论才能真实地反映城市的特征.然而,中国地理学界对于城市地域范围的理解也是百家争鸣,使得城市边界的确定举步维艰.传统的城市地域概念包括三种:城区(City Proper,CP)、城市化地区(Urbanized Areas,UA)和都市区(Metropolitan Areas,MA)(陈彦光, 2008b).如今城市化地区有被城市集聚体取代的趋势.如何客观地将城市地域进行划分归类依然缺少行之有效的方法.近年来,一些西方学者另辟蹊径,尝试以自组织的视角,从构成城市的微观实体出发定义城市,并以此为据确定城市的范围.根据自组织系统的定义,城市可以看成是由一些基本实体(如建筑物和人)组成的一个自组织系统,并以自下而上的方式实现有机增长(Portugali, 1999 ).西方确定城市边界的方法中,最具代表性的是Rozenfeld等(2008, 2009)提出的城市集群算法(City Cluster Algorithm,CCA)和Tannier等(2011)提出的利用分形特征确定城市边界的方法.本文参考Tannier等(2011)和Rozenfeld等(2008)的城市边界识别方法,提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法.该方法以自组织的角度,探讨遥感图像中地块像元之间的相互作用范围,并利用分形思想客观地确定城市的地域范围.最后本文以北京城市建设用地形态为例,具体说明如何利用该方法识别城市的边界. ...
Fractal geometry for measuring and modelling urban patterns
2
2008
... Tannier等(2011)认为,城市不仅具有分形特征,而且城市内部的形态结构类似福尼尔尘埃(Fournier Dusts),其空间组织形式如图1 所示(Frankhauser, 2008 ). ...
... 若将图1 中黑色的方块看作是建筑群或者是街区,将中间白色的间隔看作街道,那么福尼尔尘埃与我们今天所居住的城市的组织形式确实存在着一定的相似性.这些空白间隔的尺寸和空间分布并非杂乱无章,而是遵循一定的规律.首先,空白间隔的尺寸越大,其数量就越少,反之亦然.进一步分析可知,空白间隔的数量与其尺寸之间存在着较强的等级规律,并且空白间隔的数量与相应规模的集群数量之间也存在着一定的比例关系.若现实中的城市符合福尼尔尘埃的组织形式,那么城市形态也应具有与福尼尔尘埃相似的分形特征(Frankhauser, 2008 ).但由于城市形态十分复杂,且能够准确地反映街道的分布和规模的数据难以获取,因此,Tannier等(2011)利用城市建筑物的矢量分布数据,借助明可夫斯基扩张法(Minkowshi's Dilation)度量城市的分形特征,最后利用分形特征来确定城市的有效边界. ...
Measuring urban sprawl based on massive street nodes and the novel concept of natural cities
1
2010
... 矢量方法与栅格方法的原理类似.此后,Rozenfeld等(2009) 提出一种应用于矢量点图像的城市集群算法,Jia等(2010) 基于城市街道节点数据,利用该方法实现了城市边界的识别. ...
Organization of smooth image curves at multiple scales
0
1989
Self-organization and the city
2
1999
... 城市的基本测度是城市规模,但如何有效地确定城市规模依然是地理学的一个难题.Davis曾经指出:“当我们提到城市人口时,必须记住一个事实:我们的数据并不反映严格可比的地域单元(Davis, 1978 ; 引自陈彦光, 2008b ).”城市地域范围定义的不同会影响关于城市活动统计分析的结论(Rozenfeld et al, 2008 ).计量城市规模的前提之一是明确定义城市的边界.只有有效地界定地域范围并客观确定城市规模(陈彦光, 2008b),研究与统计所得出的结论才能真实地反映城市的特征.然而,中国地理学界对于城市地域范围的理解也是百家争鸣,使得城市边界的确定举步维艰.传统的城市地域概念包括三种:城区(City Proper,CP)、城市化地区(Urbanized Areas,UA)和都市区(Metropolitan Areas,MA)(陈彦光, 2008b).如今城市化地区有被城市集聚体取代的趋势.如何客观地将城市地域进行划分归类依然缺少行之有效的方法.近年来,一些西方学者另辟蹊径,尝试以自组织的视角,从构成城市的微观实体出发定义城市,并以此为据确定城市的范围.根据自组织系统的定义,城市可以看成是由一些基本实体(如建筑物和人)组成的一个自组织系统,并以自下而上的方式实现有机增长(Portugali, 1999 ).西方确定城市边界的方法中,最具代表性的是Rozenfeld等(2008, 2009)提出的城市集群算法(City Cluster Algorithm,CCA)和Tannier等(2011)提出的利用分形特征确定城市边界的方法.本文参考Tannier等(2011)和Rozenfeld等(2008)的城市边界识别方法,提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法.该方法以自组织的角度,探讨遥感图像中地块像元之间的相互作用范围,并利用分形思想客观地确定城市的地域范围.最后本文以北京城市建设用地形态为例,具体说明如何利用该方法识别城市的边界. ...
... 利用邻域扩展量化方法改变每个像元的搜索区域范围,其融合集群的数目也会相应地改变.由于城市地理现象具有无尺度性,城市形态具有分形特征,理论上不能够找到特征尺度对城市的边界进行度量(陈彦光, 2003 ),即搜索半径r 与集群数目N 在全尺度范围内呈现良好的双对数线性关系.但现实中城市的形态并不遵循规则的分形结构,而是一种类似于前分形(Prefractals)的复杂格局,在一定尺度范围内具有统计分形特征.毕竟地理规律是一种演化的规律,而不是存在的规律(陈彦光, 2008a ).地理分形是通过自组织过程逐步演化出来的(Portugali, 1999 ; Benguigui et al, 2000 ).不适当的城市管理对分形结果的发育会造成负面影响.因此,通过统计分析搜索半径r 与集群数目N 的双对数曲线,实际上仅在一定尺度范围找到分形特性.基于以上思想,可以利用双对数曲线标度区的范围来界定空间微观实体的有效作用范围,从而确定城市的地域边界. ...
Laws of population growth
4
2008
... 城市的基本测度是城市规模,但如何有效地确定城市规模依然是地理学的一个难题.Davis曾经指出:“当我们提到城市人口时,必须记住一个事实:我们的数据并不反映严格可比的地域单元(Davis, 1978 ; 引自陈彦光, 2008b ).”城市地域范围定义的不同会影响关于城市活动统计分析的结论(Rozenfeld et al, 2008 ).计量城市规模的前提之一是明确定义城市的边界.只有有效地界定地域范围并客观确定城市规模(陈彦光, 2008b),研究与统计所得出的结论才能真实地反映城市的特征.然而,中国地理学界对于城市地域范围的理解也是百家争鸣,使得城市边界的确定举步维艰.传统的城市地域概念包括三种:城区(City Proper,CP)、城市化地区(Urbanized Areas,UA)和都市区(Metropolitan Areas,MA)(陈彦光, 2008b).如今城市化地区有被城市集聚体取代的趋势.如何客观地将城市地域进行划分归类依然缺少行之有效的方法.近年来,一些西方学者另辟蹊径,尝试以自组织的视角,从构成城市的微观实体出发定义城市,并以此为据确定城市的范围.根据自组织系统的定义,城市可以看成是由一些基本实体(如建筑物和人)组成的一个自组织系统,并以自下而上的方式实现有机增长(Portugali, 1999 ).西方确定城市边界的方法中,最具代表性的是Rozenfeld等(2008, 2009)提出的城市集群算法(City Cluster Algorithm,CCA)和Tannier等(2011)提出的利用分形特征确定城市边界的方法.本文参考Tannier等(2011)和Rozenfeld等(2008)的城市边界识别方法,提出一种基于邻域扩展量化思想的遥感图像城市边界识别方法.该方法以自组织的角度,探讨遥感图像中地块像元之间的相互作用范围,并利用分形思想客观地确定城市的地域范围.最后本文以北京城市建设用地形态为例,具体说明如何利用该方法识别城市的边界. ...
... 城市集群算法的主要思路如下:若已知某一特定的时间内栅格图像中每个像元内的人口数,则选取该栅格数据中的任意一个人口像元作为搜索的初始像元,就可以对其冯诺伊曼邻位(Von Neumann Neighborhood)(Batty et al, 1997 ; 陈彦光等, 2000 )区域进行搜索.若其冯诺伊曼邻位的某一像元的人口数不为0,则将此像元与初始人口像元合并成一个集群.按照此准则迭代搜索,直至下一次搜索不再存在人口像元为止(Rozenfeld et al, 2008 ).因此,城市集群算法的本质是一种邻域搜索法. ...
... 城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度.因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围.表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变.因此,只有确定搜索半径,才能确定城市的边界.然而,对于搜索半径的讨论却鲜有所闻.城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论.Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围.这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中.此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差.基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法. ...
... 城市地域范围的确定无论对于城市地理学家还是城市规划人员而言都是一项挑战(Rozenfeld et al, 2008 ) .缺少了对有效城市地域范围的讨论,那么城市研究的种种结论将无法真实地反映现实中城市的发展与演变规律.因此,确定城市的地域边界迫在眉睫.在Tannier等(2011)和Rozenfeld等(2008)人提出的西方城市边界识别方法的启发下,本文提出了一种基于邻域扩展量化的遥感图像城市边界识别方法,相比文中介绍的西方城市边界识别方法,其优点十分明显.例如,相对于Tannier等(2011)以及Jia等(2010)提出的矢量方法,其优点之一是数据获取相对容易.Tannier等(2011)的分形方法所采用的数据是城市建筑物分布的矢量数据,Jia等(2010)的自然城市边界识别所采用的数据是街道节点和街区分布的矢量数据,而对于北京这样的巨型城市而言,此类数据的获取几乎是不可能的;即使有相应的数据,也难以保证其不会存在一些细节的丢失.二是该方法采用的遥感数据具有很好的实时性.中国城市的矢量数据通常来自于测绘部门,其对城市数据的更新往往需要很长的周期,而遥感数据良好的实时性可以保证城市边界的识别结果的及时更新并易于进行时间序列分析.此外,相较于Rozenfeld等(2008)提出的栅格方法,本方法的优点如下:一是基于邻域扩展量化的城市边界识别方法不需设定初始像元,可以同时进行多个集群的边界识别;二是量化了栅格图像像元的邻域范围,便于进行数据分析;三是城市集群算法,无论是矢量方法还是栅格方法均无法客观地确定搜索区域的范围,从而使最后的识别结果带有一定的主观性.而基于邻域扩展量化的城市边界识别方法通过对不同邻域范围的识别结果进行综合分析,能客观地确定基本单元的有效邻域范围,一定程度上消除城市边界识别结果的主观性. ...
The area and population of cities: new insights from a different perspective on cities
1
2009
... 矢量方法与栅格方法的原理类似.此后,Rozenfeld等(2009) 提出一种应用于矢量点图像的城市集群算法,Jia等(2010) 基于城市街道节点数据,利用该方法实现了城市边界的识别. ...
A fractal approach to identifying urban boundaries
0
2011
Cellular automata and fractal urban form: a cellular modelling approach to the evolution of urban land-use patterns
2
1993
... 城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度.因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围.表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变.因此,只有确定搜索半径,才能确定城市的边界.然而,对于搜索半径的讨论却鲜有所闻.城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论.Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围.这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中.此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差.基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法. ...
... 第5个测量值对应的搜索半径约为45 m.对应于北京的城市形态而言,当搜索半径r 为15~45 m时,城市形态呈现同一种分形特征;当搜索半径大于45 m时,北京原城市形态的分形特征被破坏,呈现出另一种分形特征.这意味着,北京城市形态可能具有类似双分形(Bi-fractal)( White et al, 1993 , 1994 ; 刘继生等, 1999 ) 的结构特征.这种形态特征变化的合理解释是,城市区相对于非市区而言,其内部实体密度较大.若城市实体的分布服从分形结构,那么在城市区域内,由实体形成的集群数量的改变随搜索半径的改变会呈现出一定的规律性.对于城市以外的地区,由于其实体密度较小,若搜索半径改变的程度与城市区域相同,其实体所形成的集群数量相较城市区域会呈现出显著的差异.因此城市形态分形特征的改变很可能是由于搜索半径的增大包含了城乡结合区和乡村的实体而出现的.如表2 所示,双对数曲线线性拟合斜率的绝对值并不呈现逐年单一的变化,而是先增长后下降,这反映了北京城市形态分布的演变特征.斜率绝对值的大小与集群分布的密度有关,即集群数目变化对于搜索半径变化的敏感程度.1988-1999年,北京地区建成区分布的增长模式类似于卫星城增长模式,此时集群的数目增多,密度增大,集群数目变化对于圆形邻域半径变化的敏感程度增大.1999-2006年,北京地区建设用地分布呈现一种集聚的特征,即部分集群规模不断扩张,与邻近集群融合并形成同一集群,此时集群数目不断减少.但由于距离相对较远的一些集群无法进行合并,集群数目变化对圆形邻域半径变化的敏感程度下降. ...
Urban systems dynamics and cellular automata: fractal structures between order and chaos
2
1994
... 城市具有一定的集聚性,且城市的集聚程度往往高于乡村的集聚程度.因此,融合所得到的结果中规模最大集群即代表了相应搜索半径下北京市的城区范围.表1 为基于邻域扩展量化法所得的2006年北京地区城市边界识别搜索半径与相应结果,表明随着搜索半径的改变,城市的面积也会随之改变,即城市边界也发生了改变.因此,只有确定搜索半径,才能确定城市的边界.然而,对于搜索半径的讨论却鲜有所闻.城市集群算法直接将搜索范围设定为像元的冯诺伊曼邻域范围(Rozenfeld et al, 2008 ),Jia等(2010) 将该算法应用于城市街道节点和街区的矢量图像,也未对搜索半径的取值进行讨论.Tannier等(2011)通过对双对数曲线进行多项式拟合,利用Lowe(1989)提出的计算曲线上某一点与直线的偏离程度的数学算法,找到最大的偏离点,进而确定标度区的范围.这种算法虽然从宏观上确定了搜索半径,却忽略了曲线的微观变化,而现实中城市形态的双分形(Bi-fractal)(White et al, 1993 , 1994 ; 刘继生等, 1999 )特征往往隐含在这些细微的变化之中.此外,多项式拟合并不能真实反映原曲线的真正形态,因此这种单纯地以寻找最大偏离点来确定标度区的范围会导致所确定的搜索半径与实际相比有所偏差.基于以上思考,本文在对标度区范围进行界定时未采用Tannier等(2011)的方法,而是采用时间维度地横向比较并结合线性分析的方法. ...
... 第5个测量值对应的搜索半径约为45 m.对应于北京的城市形态而言,当搜索半径r 为15~45 m时,城市形态呈现同一种分形特征;当搜索半径大于45 m时,北京原城市形态的分形特征被破坏,呈现出另一种分形特征.这意味着,北京城市形态可能具有类似双分形(Bi-fractal)( White et al, 1993 , 1994 ; 刘继生等, 1999 ) 的结构特征.这种形态特征变化的合理解释是,城市区相对于非市区而言,其内部实体密度较大.若城市实体的分布服从分形结构,那么在城市区域内,由实体形成的集群数量的改变随搜索半径的改变会呈现出一定的规律性.对于城市以外的地区,由于其实体密度较小,若搜索半径改变的程度与城市区域相同,其实体所形成的集群数量相较城市区域会呈现出显著的差异.因此城市形态分形特征的改变很可能是由于搜索半径的增大包含了城乡结合区和乡村的实体而出现的.如表2 所示,双对数曲线线性拟合斜率的绝对值并不呈现逐年单一的变化,而是先增长后下降,这反映了北京城市形态分布的演变特征.斜率绝对值的大小与集群分布的密度有关,即集群数目变化对于搜索半径变化的敏感程度.1988-1999年,北京地区建成区分布的增长模式类似于卫星城增长模式,此时集群的数目增多,密度增大,集群数目变化对于圆形邻域半径变化的敏感程度增大.1999-2006年,北京地区建设用地分布呈现一种集聚的特征,即部分集群规模不断扩张,与邻近集群融合并形成同一集群,此时集群数目不断减少.但由于距离相对较远的一些集群无法进行合并,集群数目变化对圆形邻域半径变化的敏感程度下降. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}